
An anderer Stelle auf dieser Website wird (auf Englisch) ein Modul mit zwei sogenannten H-Brücken beschrieben, mit dem zwei Motoren hinsichtlich Drehzahl und Drehrichtung angesteuert werden können. Ein Vorteil dieses Moduls besteht darin, dass, wenn keine Steuerung der Motordrehrichtung erforderlich ist, jeder Satz von zwei (Motor-)Ausgängen auch als zwei separate Treiberausgänge (sogenannte Halbbrücken) genutzt werden kann. Dadurch können somit bis zu vier einzelne Verbraucher (wie Lampen, Motoren, pneumatische Ventile usw.) angesteuert werden.
Das Modul kann die angeschlossenen Verbraucher direkt mit der Modul-Versorgungsspannung versorgen, die über die Metallstreifen an den Seiten des Moduls zugeführt wird. Für anspruchsvollere Verbraucher kann eine externe Versorgungsspannung bereitgestellt werden.
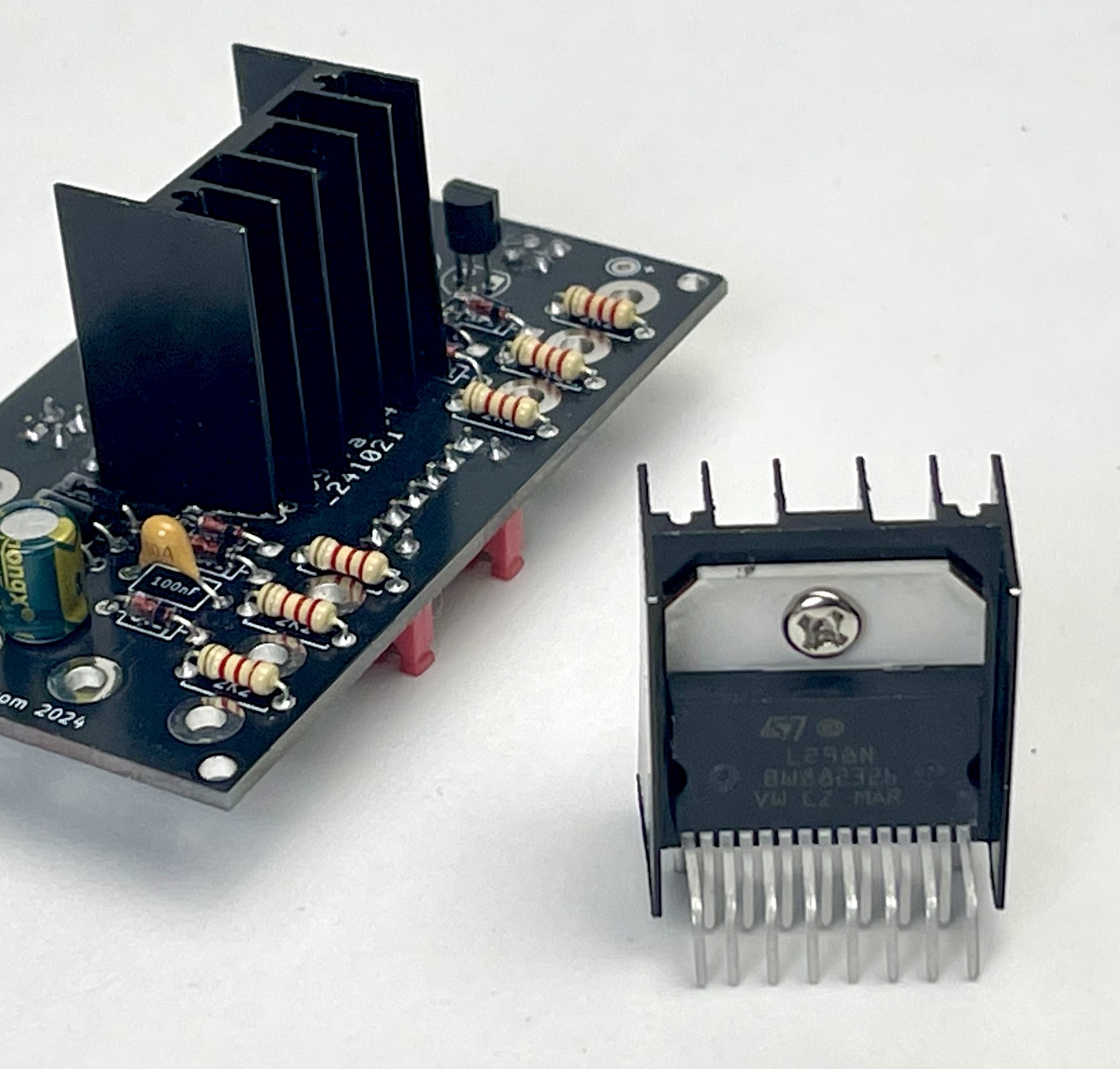
Dieses Doppel-H-Brücken-Modul enthält einen L298N-Chip zur Ansteuerung der angeschlossenen Verbraucher. Das Modul hat eine maximale Dauerstromstärke von 2 Ampere pro Kanal und hält Spitzenströmen von bis zu 3 Ampere stand. Die extern angelegte Spannung darf zwischen 5 V und 35 V Gleichstrom liegen.
Alle Anschlüsse des Moduls, an denen die klassischen 2,5-mm-Fischertechnik-Stecker verwendet werden können, sind doppelt als Dupont-Stifte ausgeführt, um Experimente mit Versuchsdrähten und einem Steckbrett zu erleichtern. Nicht zuletzt aufgrund der vielfältigen Anschlussmöglichkeiten ist dieses Modul sehr vielseitig einsetzbar.
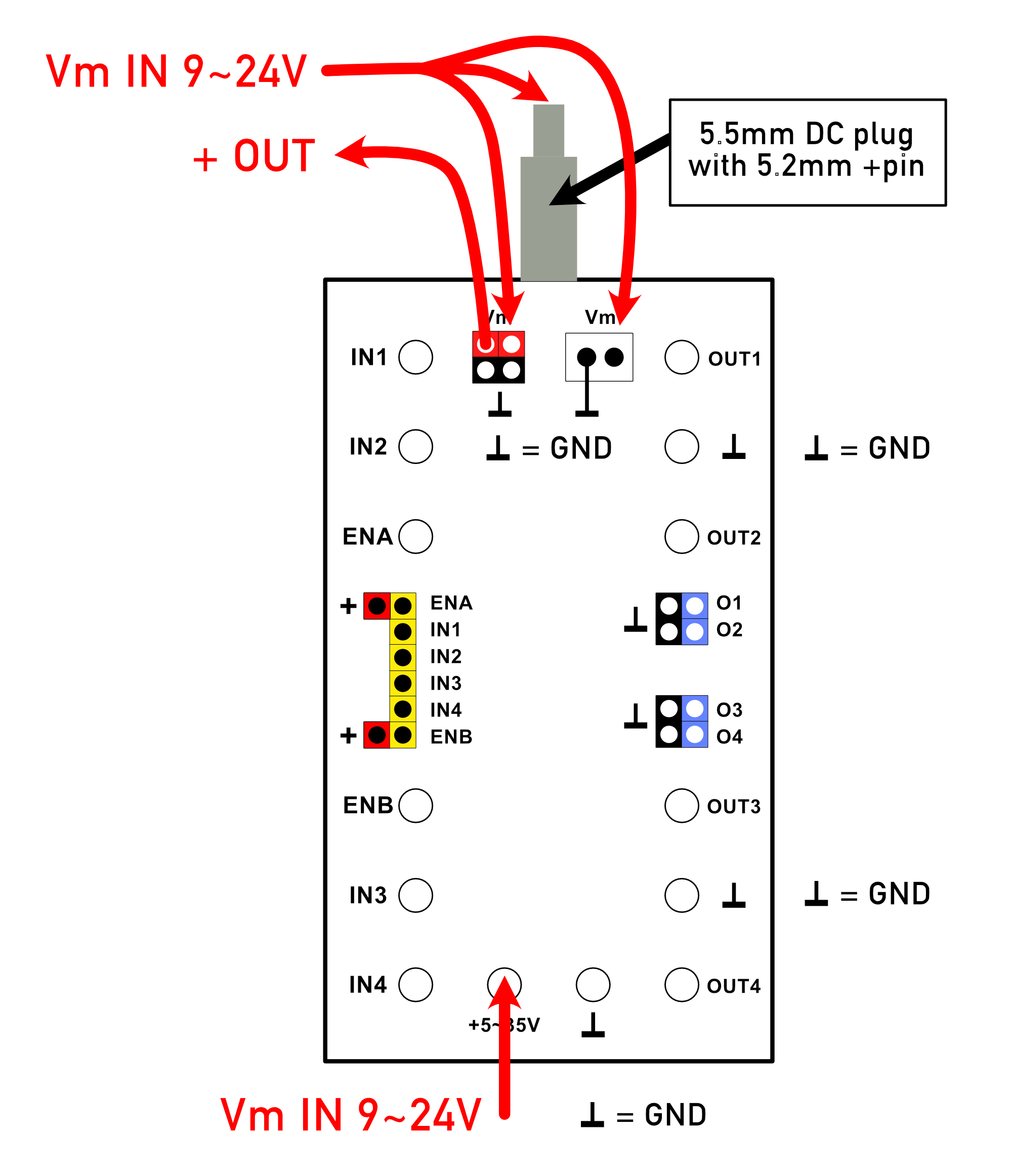
Der Motor-/Verbraucherstrom kann extern über den DC-Stecker (5,5 mm mit 5,2 mm + Pin) auf der Rückseite des Moduls zugeführt werden. Hierfür können auch der JST-Stecker, die Leiterplatten-Stiftleiste oder die standardmäßigen 2,5-mm-fischertechnik-Stecker verwendet werden.
Die nebenstehende Tabelle zeigt die Möglichkeiten zur Steuerung der Drehrichtung eines an die Ausgänge O1/O2 und/oder O3/O4 angeschlossenen Gleichstrommotors mit den entsprechenden Eingangssignalen IN1/IN2 mit dem „Enable“-Eingang ENA und IN3/IN4 mit dem „Enable“-Eingang ENB.
Wenn am „Enable“-Eingang ein „Low“-Signal (oder kein Signal) anliegt, sind die beiden entsprechenden Ausgänge unabhängig von den an den Eingängen anliegenden Steuersignalen ebenfalls „inaktiv“. Wenn die „Enable“-Eingänge nicht benötigt werden, kann durch Setzen eines Computer-Jumpers auf den entsprechenden „Enable“-Eingang einfach ein „aktives“ Eingangssignal angelegt werden. Zu diesem Zweck ist neben diesen Eingängen ein roter Pin (mit der positiven Betriebsspannung) vorgesehen.
Bei den meisten einfachen Experimenten mit dem Modul werden beide Computer-Jumper an den „Enable“-Eingängen angebracht sein.
| IN1 | IN2 | ENA | O1 | O2 | Motor |
|---|---|---|---|---|---|
| IN2 | IN3 | ENB | O3 | O4 | |
| 0 | 0 | 0 | 0 | 0 | Gestopt |
| 0 | 1 | 0 | 0 | 0 | Gestopt |
| 1 | 0 | 0 | 0 | 0 | Gestopt |
| 1 | 1 | 0 | 0 | 0 | Gestopt |
| 0 | 0 | 1 | 0 | 0 | Gestopt |
| 0 | 1 | 1 | 0 | 1 | Dreht sich nach links |
| 1 | 0 | 1 | 1 | 0 | Dreht sich im Uhrzeigersinn |
| 1 | 1 | 1 | 1 | 1 | Gebremst |
Bei jedem Motor können sowohl die Drehrichtung als auch die Drehzahl gesteuert werden. Die Drehrichtung kann ausgewählt werden, indem einer der beiden entsprechenden Eingänge gemäß der Tabelle auf „aktiv“ gesetzt wird. Sind beide Eingänge (und/oder der entsprechende „Enable“-Eingang) „inaktiv“, dreht sich der Motor nicht. Wurde eine Drehrichtung durch Aktivieren eines der Eingänge ausgewählt, kann die Drehzahl gegebenenfalls mit einem „pulsbreitenmodulierten“ (PWM) Signal am „Enable“-Eingang gesteuert werden.
Eine detaillierte Erörterung der Möglichkeiten der Pulsweitenmodulation würde den Rahmen dieses Handbuchs sprengen. Hierzu finden Sie online leicht zahlreiche Informationen.
Wenn der gemeinsame Stromverbrauch der angeschlossenen Verbraucher relativ gering ist, kann die Standard-Stromversorgung genutzt werden, die über die Metallstreifen an den Seiten des Moduls bereitgestellt wird. Dazu muss eine Brücke (Computer-Jumper) auf die beiden oberen roten „Vm“-Dupont-Stifte gesetzt werden. Solange „Vm“ auf diese Weise durchgeschaltet ist, kann an den Versorgungsspannungs-Anschlüssen an der Unterseite der Platine, aber auch über den JST-Stecker, die über die Metallstreifen an den Seiten des Moduls bereitgestellte Versorgungsspannung abgegriffen werden. Bei den klassischen fischertechnik „Silberlingen“ beträgt diese in der Regel etwa 10 Volt.
Auf der nebenstehenden Abbildung sind die Möglichkeiten zur Zuführung einer externen Versorgungsspannung dargestellt, wenn der Computer-Jumper „Vm“ entfernt wurde.
Solange der Computer-Jumper auf den beiden roten „Vm“-Pins steckt, wird die extern angelegte Versorgungsspannung auch an den Metallstreifen des Moduls angelegt und als Hauptstromversorgung für das Modul oder eventuell andere angeschlossene Silberlinge genutzt. Sobald der Computer-Jumper auf maximal einem H-Brücken-Modul sitzt, verwenden Sie also kein anderes Versorgungsmodul (wie das fischertechnik-Gleichrichtermodul). Das Modul und eventuelle andere benachbarte Silberlinge werden automatisch aus dieser externen Versorgungsspannung mit Strom versorgt. Wenn auch andere klassische Silberlinge auf diese Weise versorgt werden, wird empfohlen, ein externes 9-Volt-DC-Netzteil zu wählen, das auf der Rückseite mit einem 5,5-mm-Stecker angeschlossen werden kann.
Es ist möglich, die externe Stromversorgung mit benachbarten H-Brücken-Modulen über Kabel mit JST- und/oder fischertechnik-Steckern durchzuschleifen. Bei diesen zusätzlich durchgeschleiften Modulen muss jedoch der „Vm“-Computer-Jumper entfernt werden!
Wenn Sie eine Reihe benachbarter H-Brücken-Module jeweils mit einem eigenen Netzteil versorgen möchten, gibt es zwei Möglichkeiten:
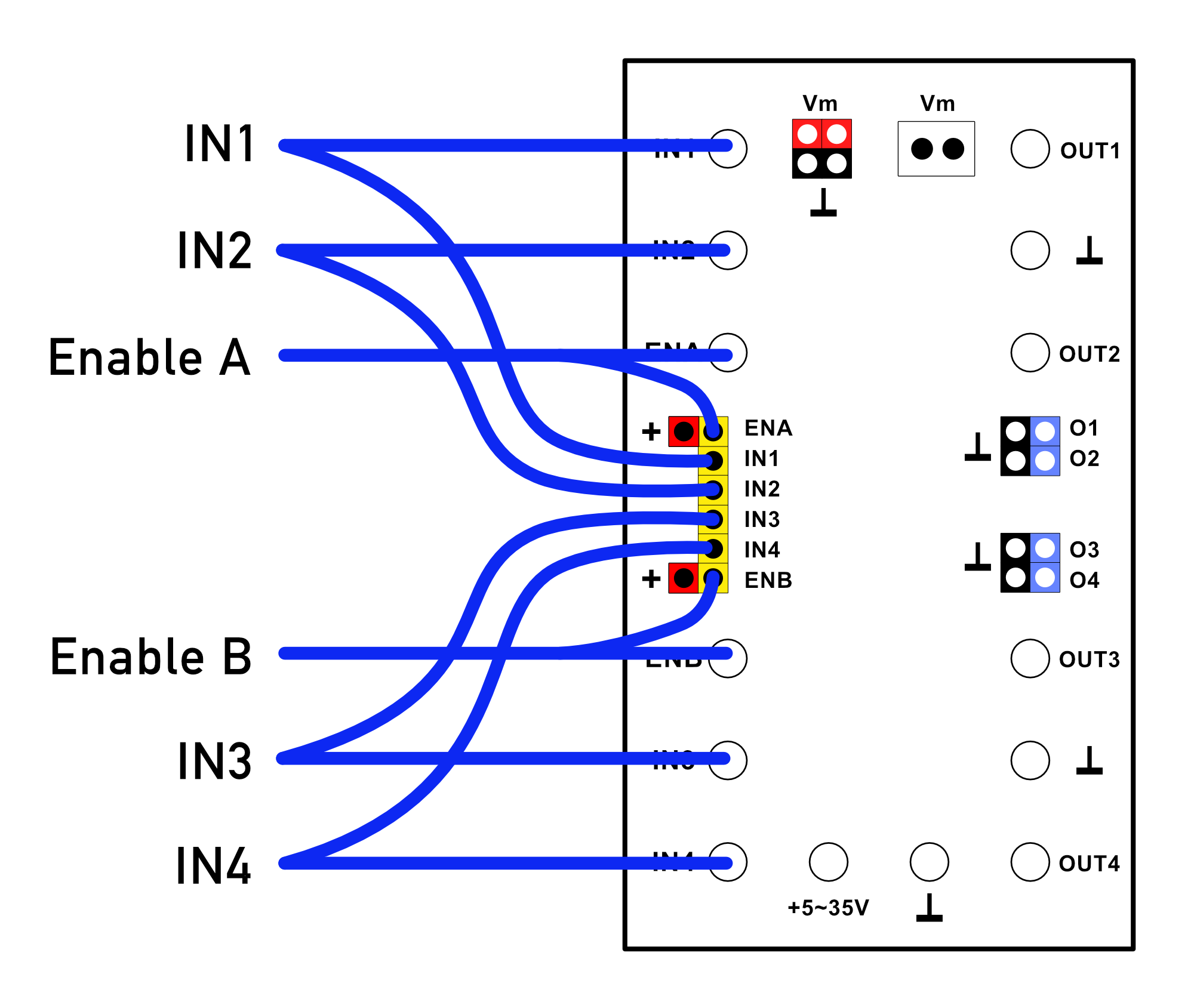
Die Eingänge befinden sich auf der linken Seite der Leiterplatte. Die Eingänge sind doppelt ausgeführt, sodass sowohl die herkömmlichen fischertechnik-Stecker als auch Experimentierkabel (oder eine Kombination aus beiden) verwendet werden können.
Auf der nebenstehenden Abbildung sind keine Computer-Jumper gesetzt, sodass beide „Enable“-Eingänge aktiv genutzt werden. Es muss ein „aktives“ (oder PWM-)Signal anliegen, um die Ausgänge zu aktivieren. Setzen Sie den roten Computer-Jumper auf den entsprechenden „Enable“-Eingang, wenn die Ausgänge den entsprechenden Signalen an den „IN“-Eingängen direkt folgen sollen.
Beachten Sie außerdem, dass die „Vm“-Durchschaltung ebenfalls nicht installiert ist. Es muss also eine externe Versorgungsspannung angelegt werden, und die angeschlossenen Verbraucher werden nicht über die Standard-Betriebsspannung des „Silberling“-Moduls versorgt.
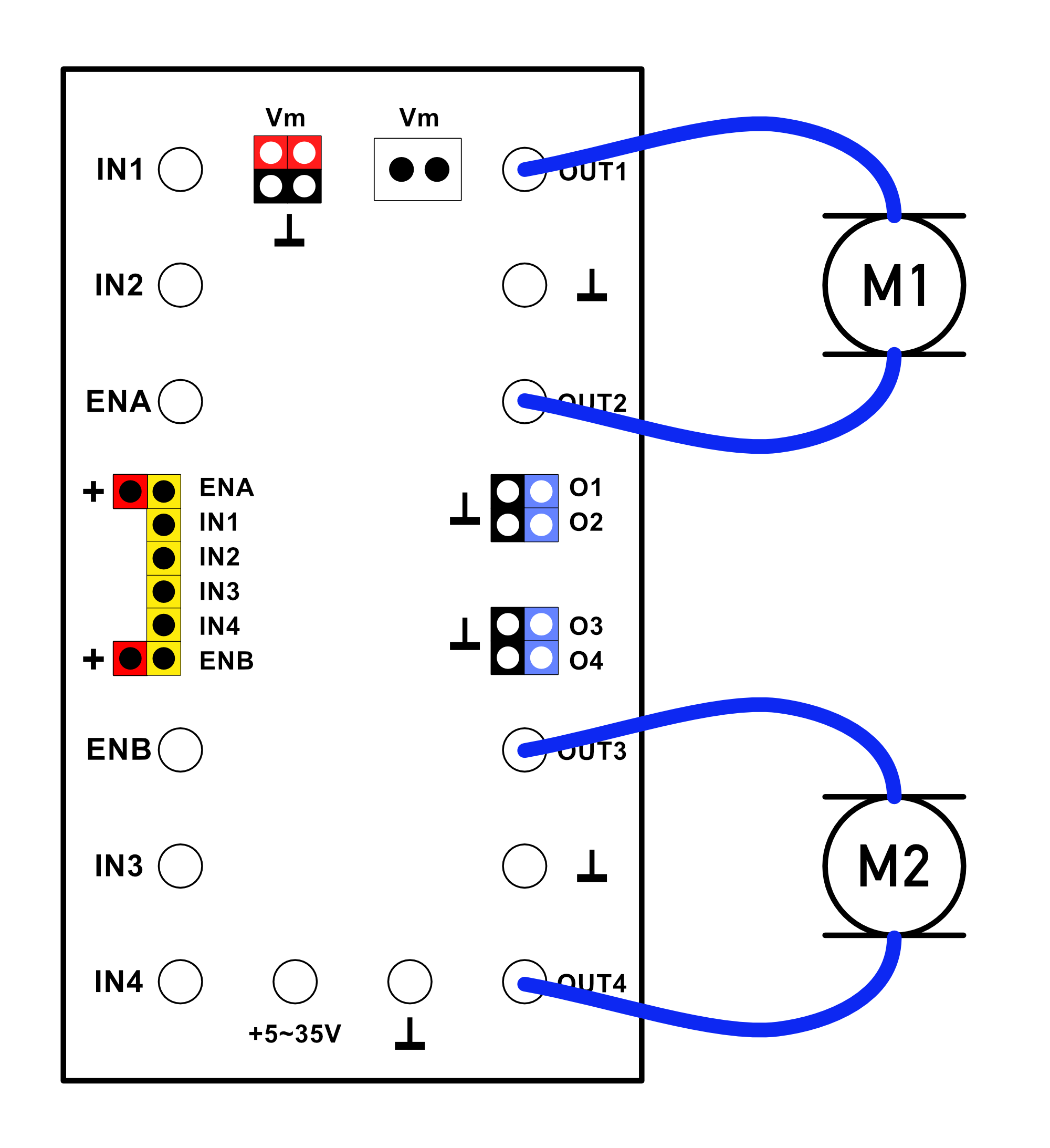
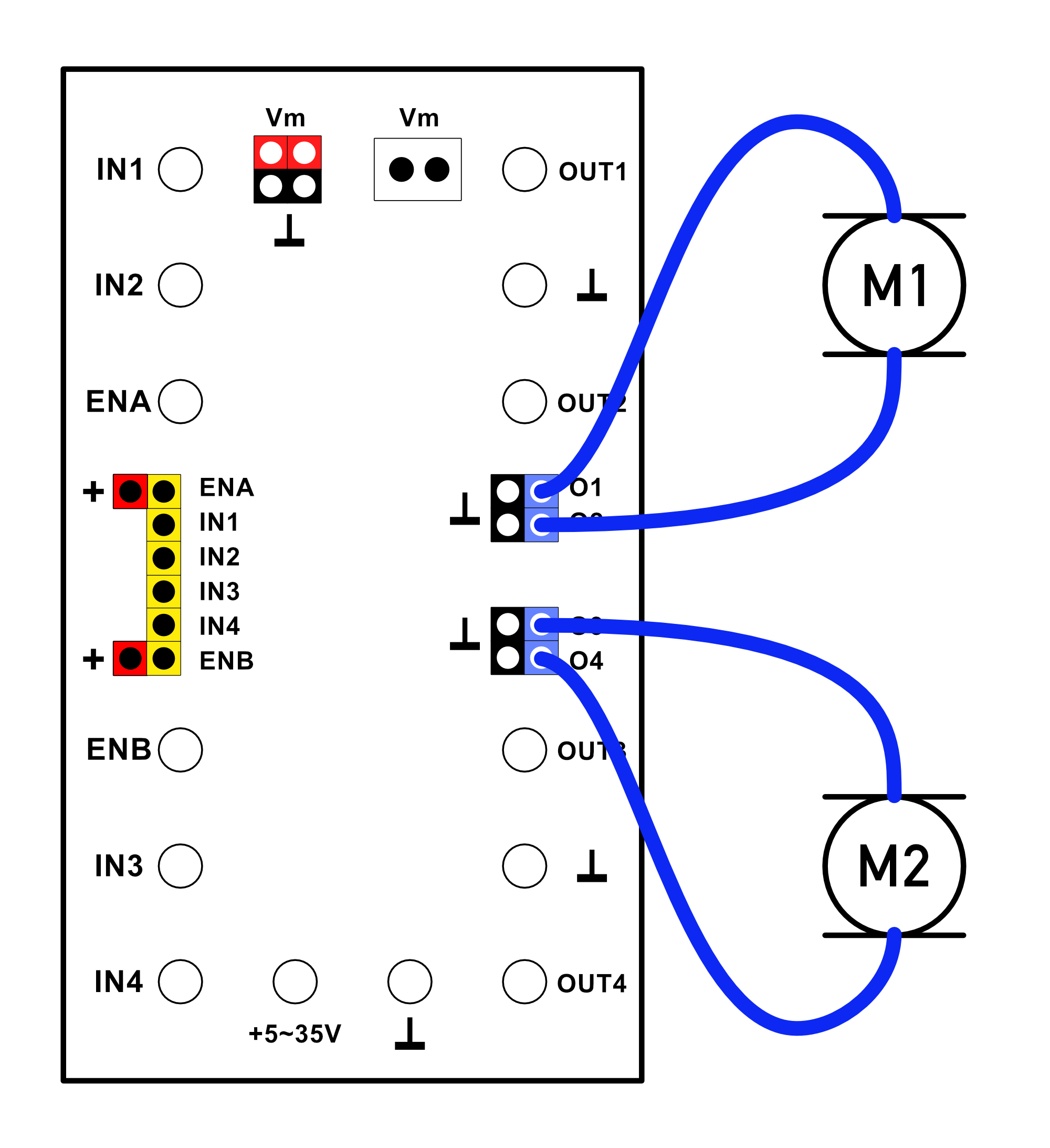
Im Folgenden werden zwei technisch austauschbare Möglichkeiten zum Anschluss von zwei Motoren an das Modul beschrieben. In einem Fall werden die Motoren mit fischertechnik-Steckern angeschlossen, im anderen Fall werden Dupont-Stiftleisten zum Anschluss der Motoren verwendet. Selbstverständlich kann auch eine Kombination dieser Anschlussmöglichkeiten genutzt werden.
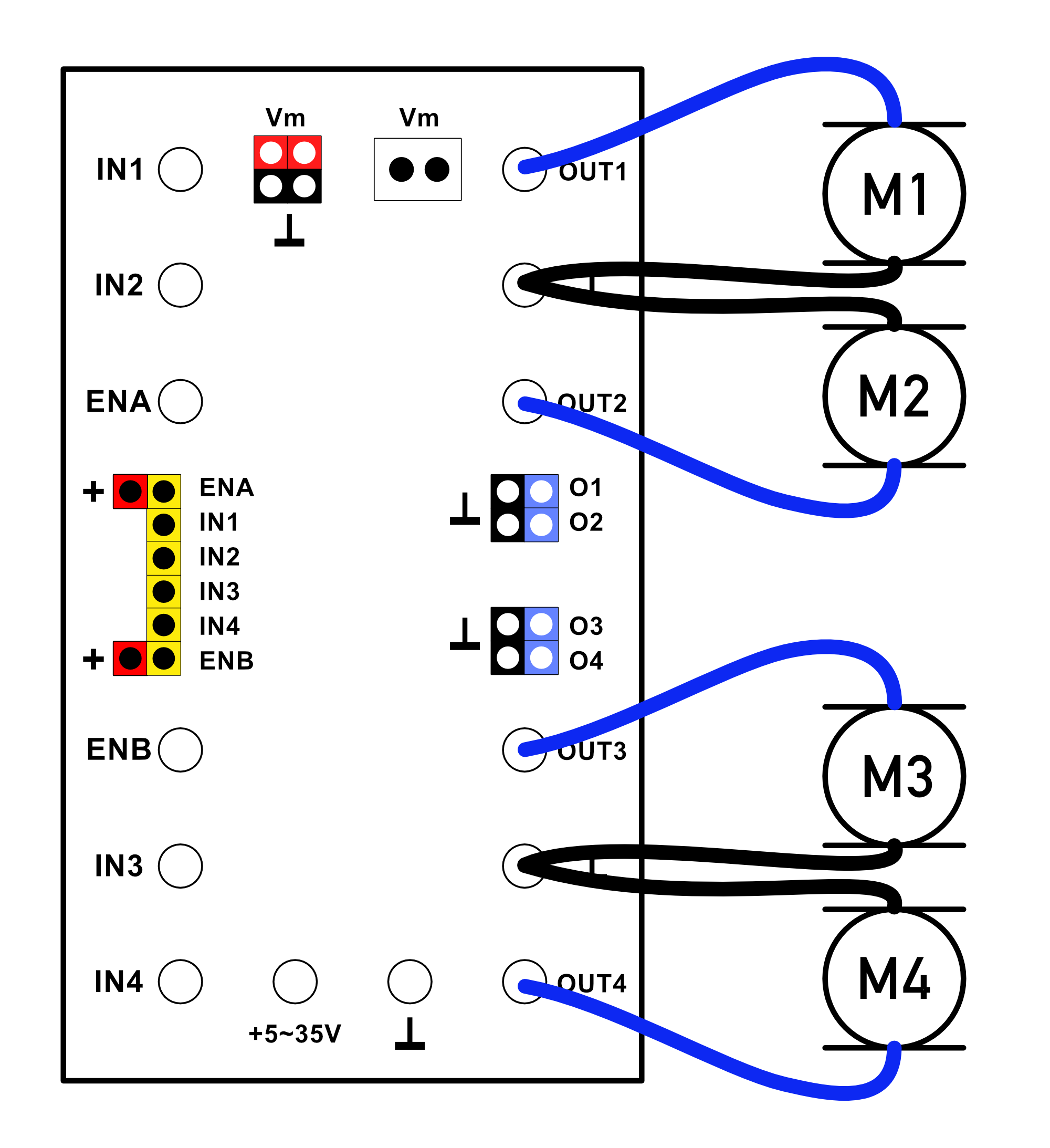
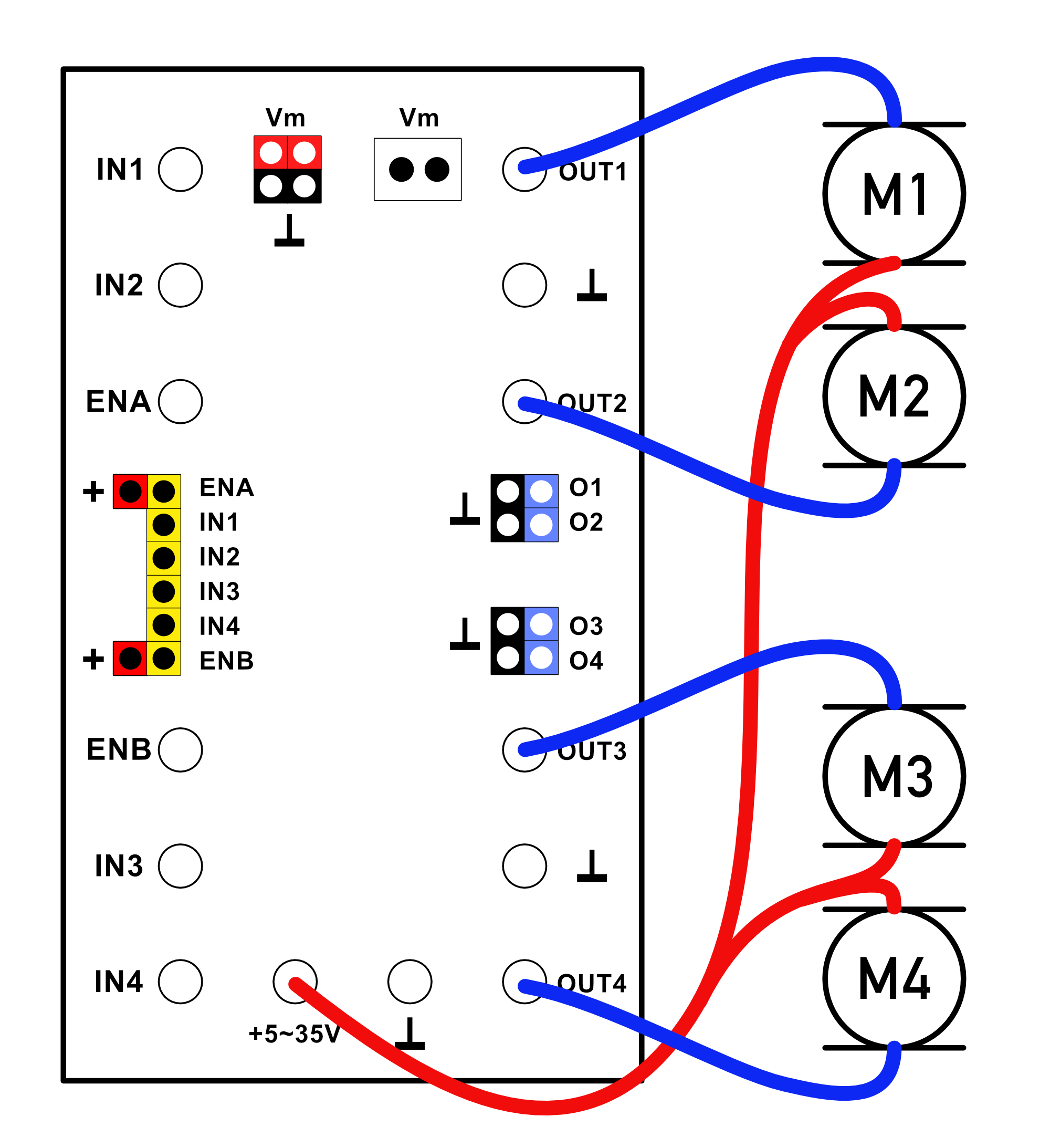
Ist die Drehrichtung der Motoren unerheblich, können alle Ausgänge als separate Verbraucherausgänge genutzt und somit bis zu vier Motoren (oder andere Verbraucher) angeschlossen werden.
Wird der Verbraucher zwischen Treiberausgang und „Masse“ angeschlossen, folgt dieser der sogenannten positiven Logik der Eingänge. Das bedeutet, dass der Verbraucher aktiviert wird, wenn der entsprechende Eingang „aktiv“ wird. Ist ein umgekehrtes Schaltverhalten gewünscht (sog. negative Logik), reicht es aus, den Verbraucher einfach zwischen Pluspol und Ausgang anzuschließen. Ein Motor läuft standardmäßig und stoppt erst, wenn der entsprechende Steuereingang „aktiv“ wird.
Um die Vielseitigkeit dieses Moduls noch einmal zu unterstreichen, folgt abschließend ein Anwendungsbeispiel, bei dem zwei pneumatische Magnetventile über zwei lichtempfindliche Widerstände (LDRs) angesteuert werden.
Die Schaltung funktioniert mit dem Standard-LDR von fischertechnik (Nr. 31361, Nr. 32697 oder Nr. 32698), aber auch mit einem Fototransistor (Nr. 36134). Da die Eingänge des Moduls auf Spannungsunterschiede reagieren, muss mit einem zusätzlichen 10-kΩ-Widerstand (z. B. direkt in der Verdrahtung) ein Spannungsteiler gebildet werden. [Klicken Sie auf das Bild, um es zu vergrößern]
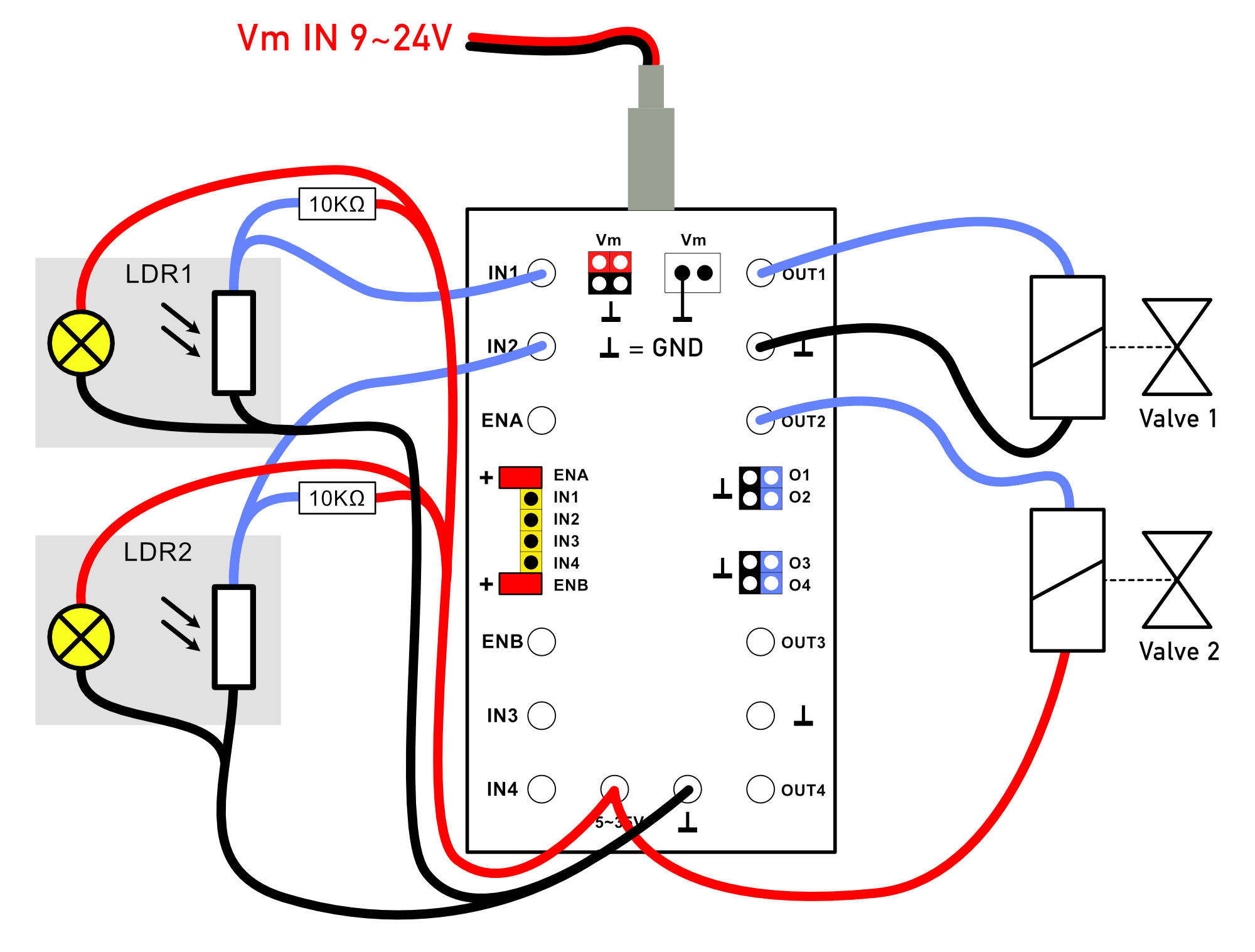
Beachten Sie, dass (nur zu Demonstrationszwecken) Magnetventil 2 standardmäßig erregt (und pneumatisch geöffnet) ist, während Magnetventil 1 erst öffnet, wenn das Licht der entsprechenden Lichtschranke unterbrochen wird. Durch beliebigen Anschluss an den +- oder --Pol lässt sich auf diese Weise die gewünschte Logikfunktion der Eingangssignale einfach auswählen.
Im Beispiel werden nur zwei Magnetventile angeschlossen, aber mit dem Modul ist es möglich, vier einzelne Magnetventile anzusteuern. Da die „Enable“-Eingänge hier ungenutzt bleiben, müssen hier die Computer-Jumper gesetzt werden.