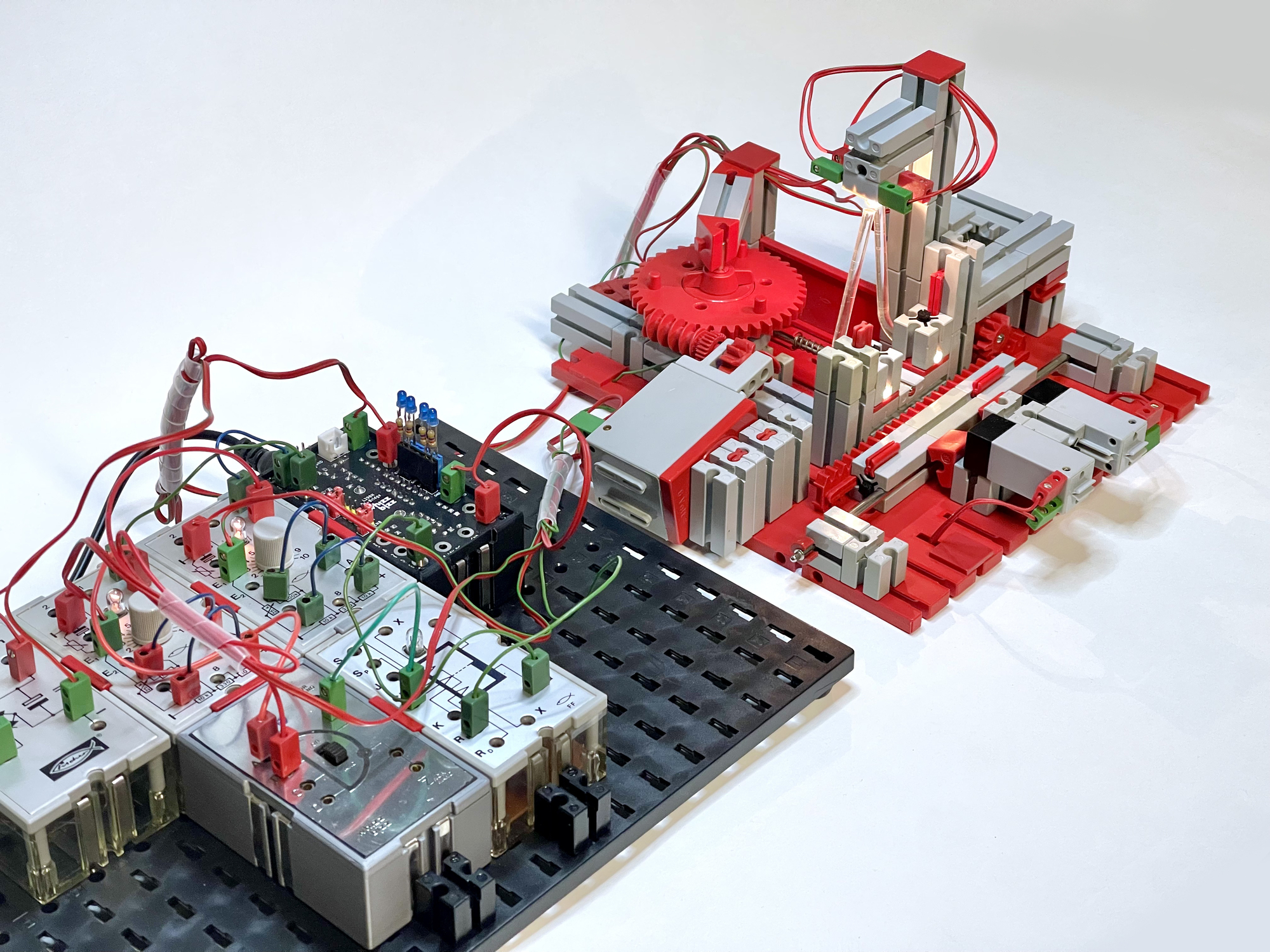
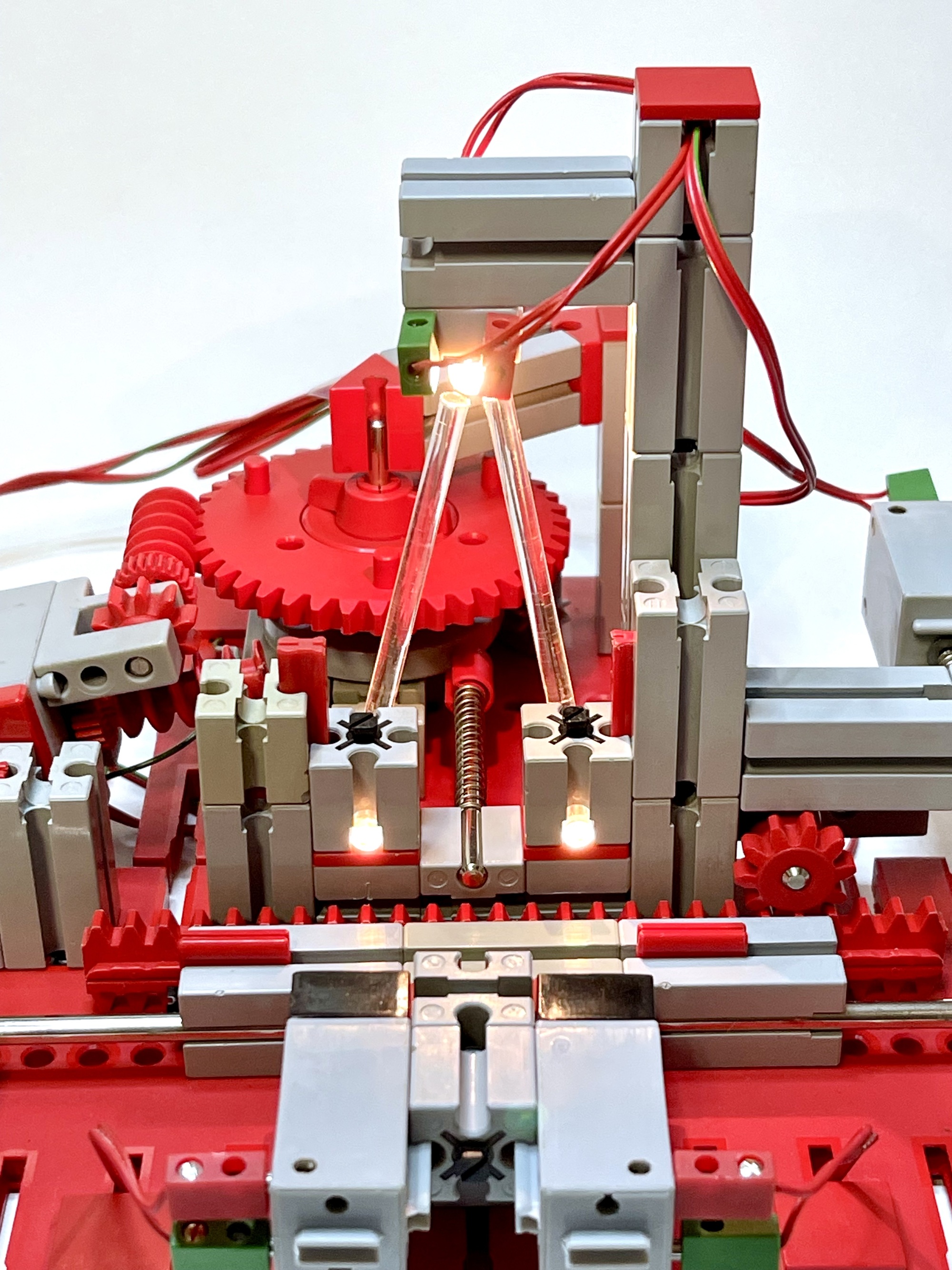
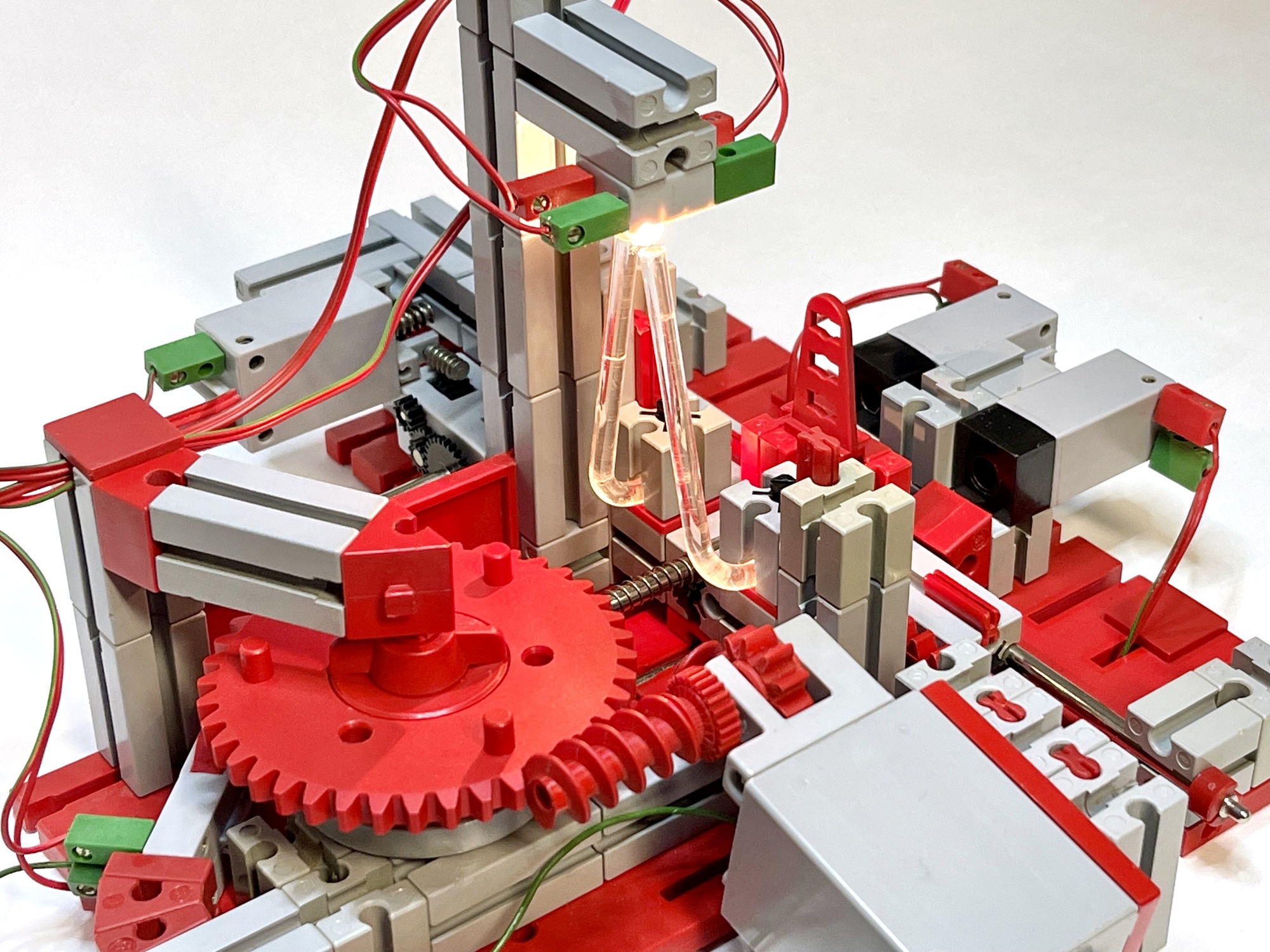
In fischertechniks Hobby4, Band 3 modellenboek vond ik vanaf pagina 54 een geschikt model om de gebouwde H-Brugmodules te testen. De opbouw van dit model is hiernaast te zien. Een ‘werkstuk’ (zie detailfoto hieronder) wordt op een door een mini-motor in beide richtingen te bewegen balk gelegd, waarna het automatisch tussen de beide fotoweerstanden zal worden gepositioneerd. De afstand tussen de twee L-vormige lichtgeleiders is precies 30 mm. Tenzij het werkstuk al direct zuiver in het midden wordt geplaatst, zal altijd een van de twee lichtgevoelige weerstanden hierdoor worden geblokkeerd. Deze blokkade kan worden opgeheven door de balk in de juiste richting te bewegen.
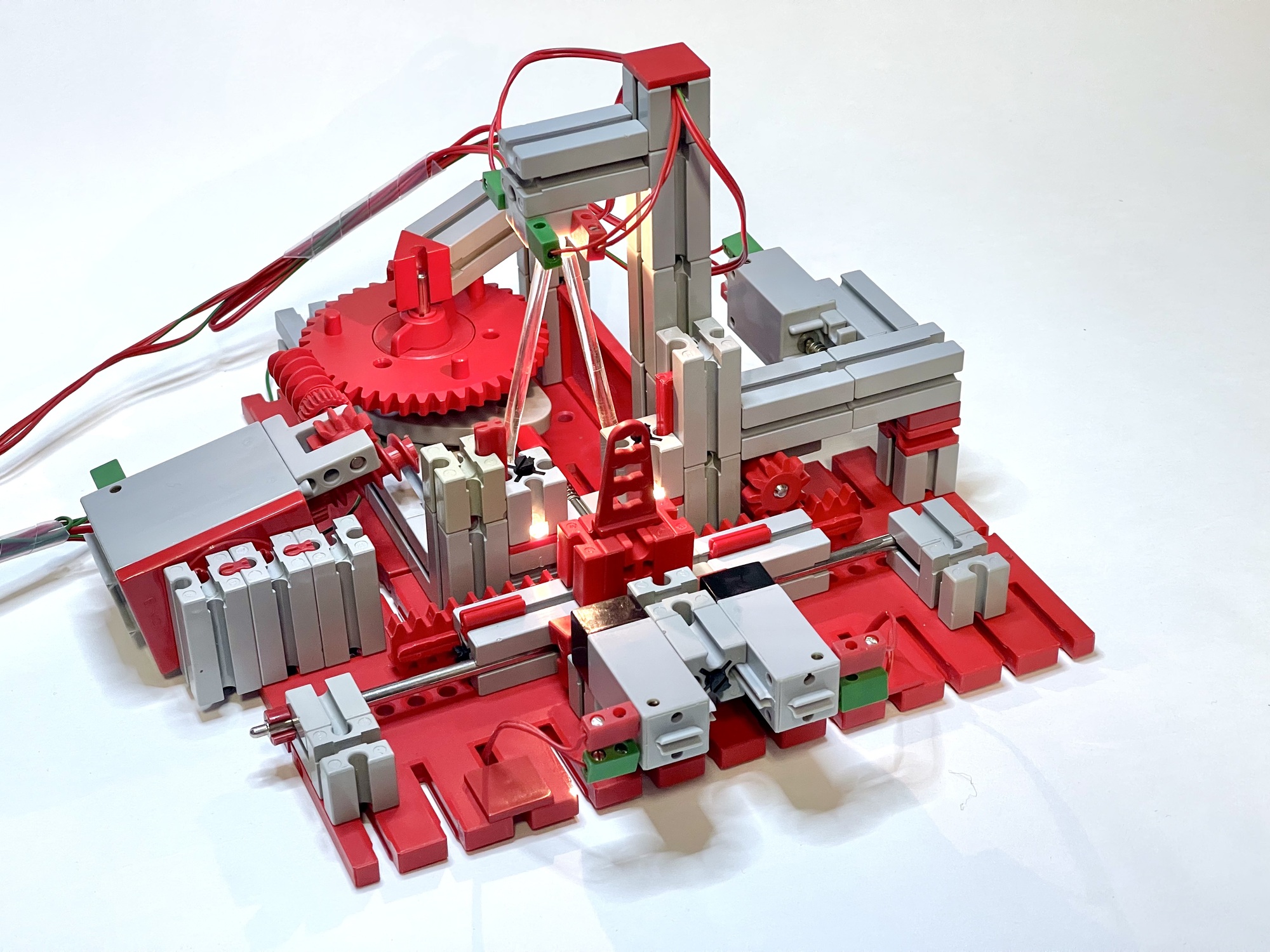
Hierbij ‘lezen’ verschilversterkermodules de lichtsensoren en sturen de relais aan die bepalen óf en in welke richting de balk beweegt. Aldus aangestuurd zal de mini-motor M1 (rechts op de foto) de balk met het werkstuk richting het middelpunt tussen de sensoren bewegen. Zodra uiteindelijk beide LDR’s weer beschenen worden ligt het werkstuk (27,5 mm breed) precies in het midden en stopt deze beweging. De startrichting van de beweging van de balk is dus afhankelijk van welke sensor als eerste geblokkeerd wordt en de motor moet in beide richtingen kunnen draaien. Een mooi klusje voor een H-Brug!
Het model bevat een tweede motor (de grijze ‘classic’ motor links op de foto) waarmee een as door een gat in het werkstuk wordt gedreven zodra het precies in het midden tussen de twee lichtgeleiders tot stilstand is gekomen. Door een omwenteling van deze tweede motor M2, waarop een ei-wiel is gemonteerd, wordt dan de ‘boor’ naar buiten geduwd. In het originele model draait deze ‘boor’-motor simpelweg zodra beide fotoweerstanden (weer) worden beschenen met het licht van het lampje dat via de twee lichtgeleiders wordt verspreid. Het wordt in de originele tekst als uitdaging aan de bouwer overgelaten de regeling zodanig te perfectioneren dat slechts een enkele omwenteling (werkslag) wordt uitgevoerd nadat het werkstuk midden voor de uitstoter gepositioneerd is.
In de originele tekst wordt als idee gegeven hiertoe de de gehele regeling en daarmee het proces te resetten. Ik loste het op met een AND-poort en een Flip-Flop-module. Er is dan geen manuele reset nodig en motor M2 draait netjes telkens slechts een enkele omwenteling nadat het ‘werkstuk’ gepositioneerd is. Het originele schakelschema met de Relais Bausteine vindt u in de originele beschrijving (afbeelding 55.1 in de originele documentatie), het alternatieve schakelschema waarin gebruik is gemaakt van de hierboven beschreven zelfbouw H-Brug ‘Silberling’ is hieronder te zien. De ENA en ENB ‘enable’-ingangen dienen bij deze regeling altijd geactiveerd te zijn, dus deze zijn met jumpers naar de + verbonden. De Vm-jumper werd daarentegen juist verwijderd zodat een externe DC-adaptor kan worden aangesloten om de motoren te voeden. Zolang deze nog niet is aangesloten kan de regeling getest worden met de optionele LED-indicator die verderop wordt besproken.
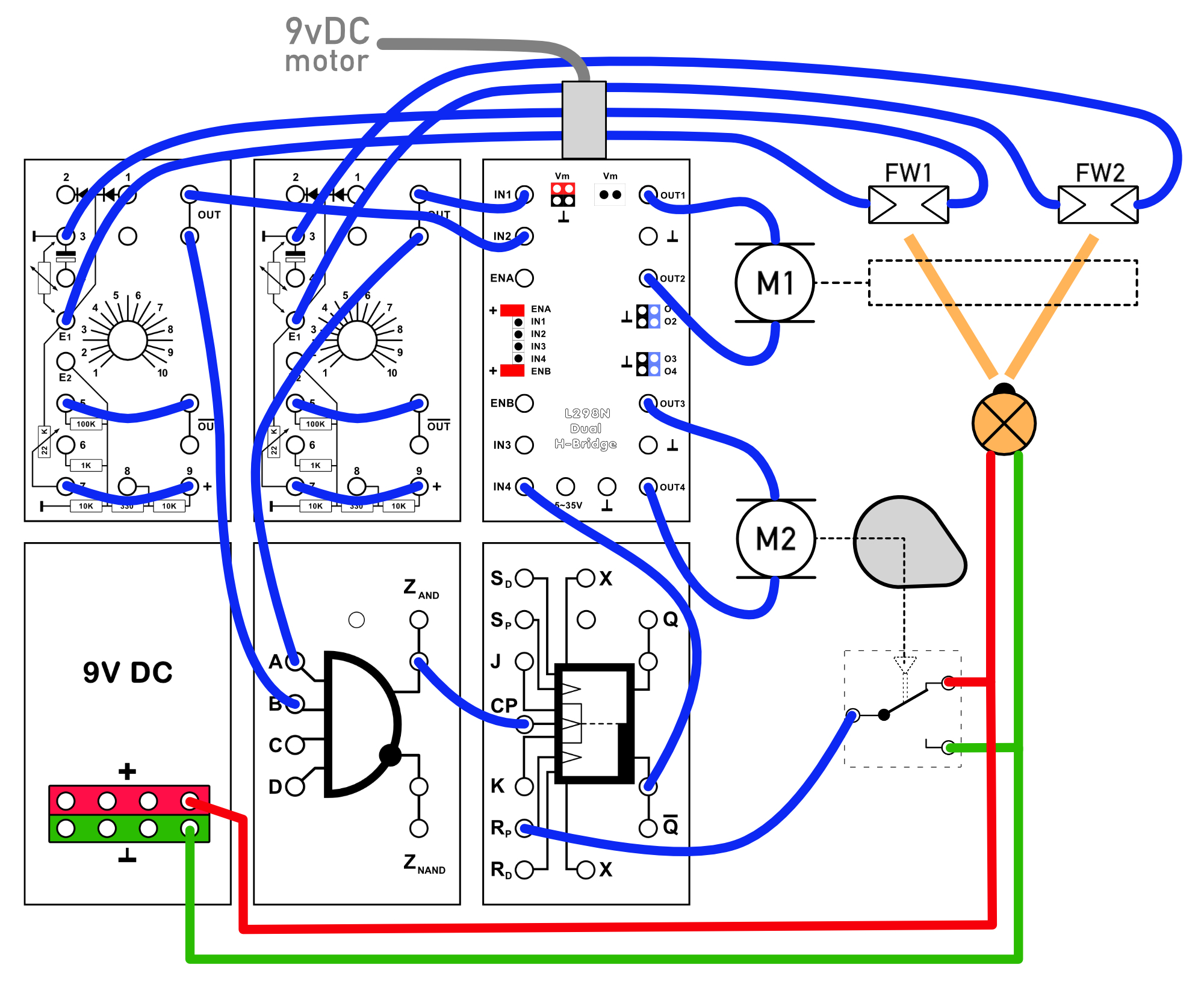
Voor het detecteren van lichtonderbreking zijn de twee fotoweerstanden FW1 en FW2 ieder op een eigen Grundbaustein aangesloten. Zodra er geen licht meer valt op een fotoweerstand, is de ongeïnverteerde uitgang van de betreffende Grundbaustein LOW of ‘0’. Omdat de ‘Silberlingen’ werken met negatieve logica, ligt de uitgangsspanning dan rond de 9 volt. Omdat de H-Brug module met positieve logica werkt kunnen deze signalen direct gebruikt worden als HIGH, of ‘1’, signaal voor de draairichting-ingangen IN1 en IN2. Motor M1 zal de betreffende richting opdraaien waardoor het werkstuk uiteindelijk midden tussen de fotoweerstanden zal worden gepositioneerd. Op dit moment worden beide sensoren weer met licht beschenen en stopt motor M1. Nu het werkstuk is gepositioneerd geeft de AND/NAND module een klokpuls aan de Flip-Flop. Door dit activeren wordt motor M2 in werking gezet. Na een volledige omwenteling activeert deze motor een schakelaar die de Flip-Flop weer reset waardoor de motor weer wordt stopgezet.
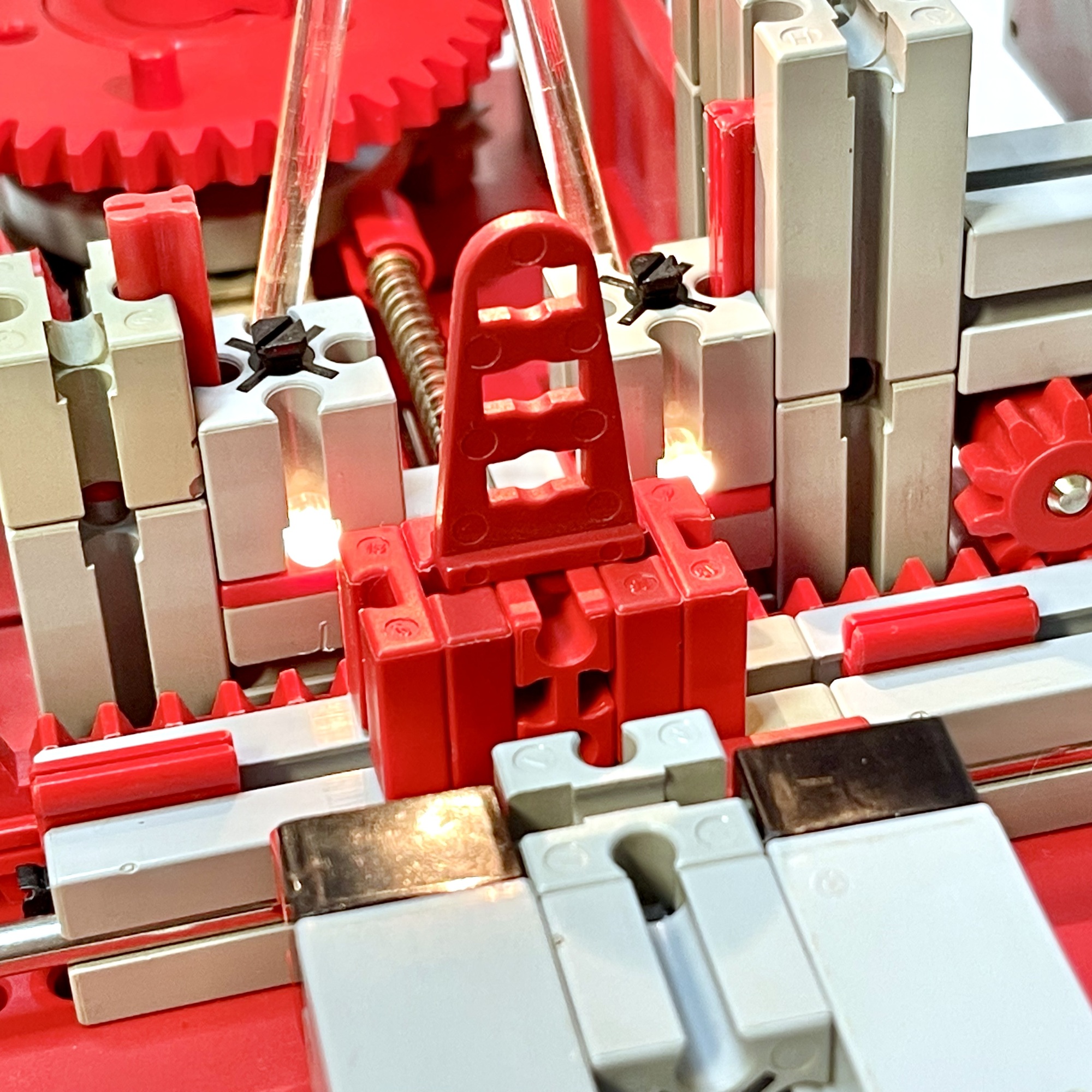
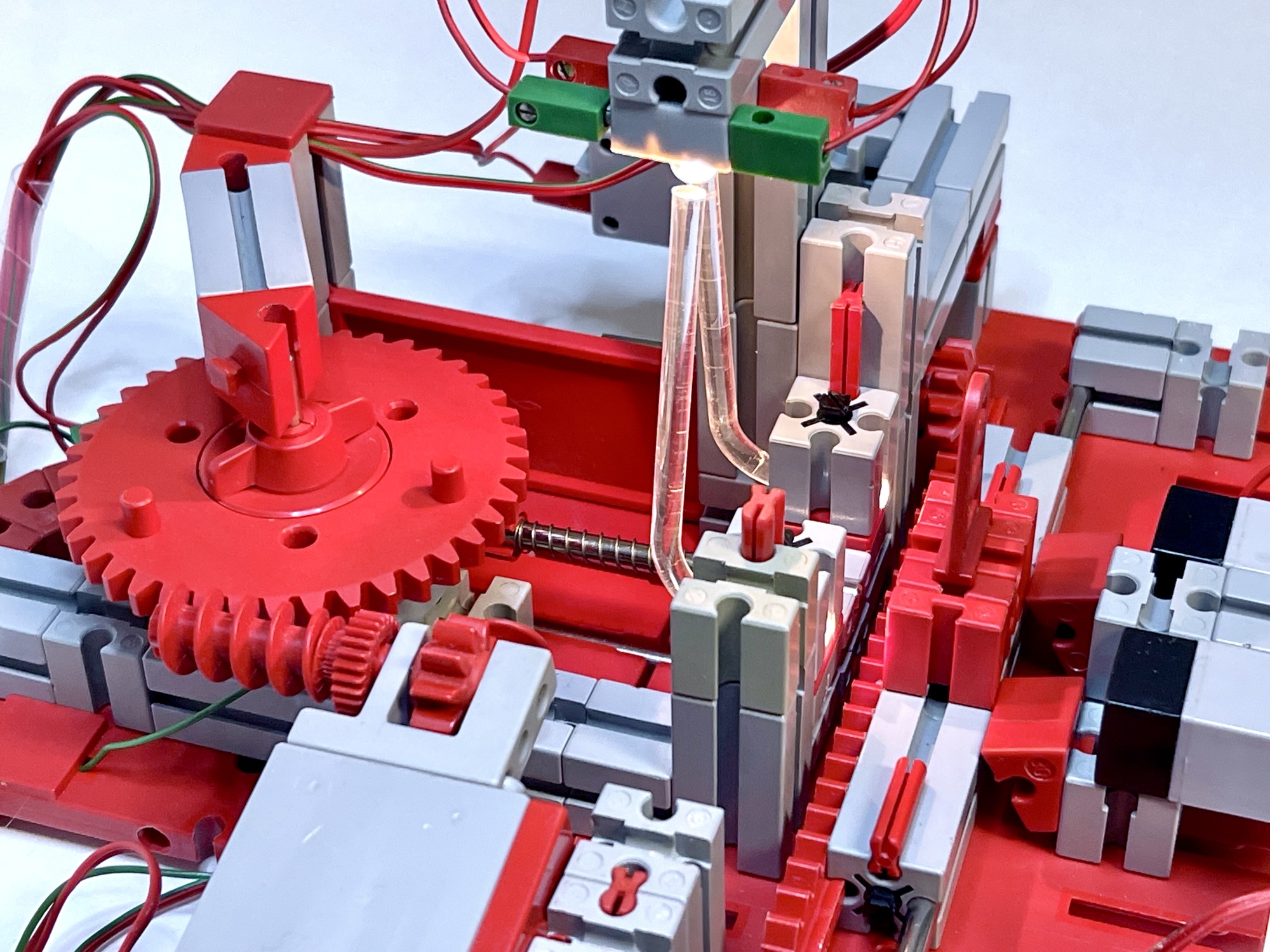
De originele handleiding is niet erg helder over de opbouw van het ‘werkstuk’. Er wordt een eenvoudige bouwsteen 30 voorgesteld zonder middenboring. Hierdoor zal de naar buiten stotende ‘boor’ het werkstuk slechts van de balk stoten (of het model zal vastlopen als dat niet direct lukt). Bovendien is de door de zwarte bevestigingsnok aan een kant van de bouwsteen de totale breedte meer dan 30 mm. Hierdoor kan de motor de bewegingsrichting zichzelf onrustig blijven corrigeren waardoor het ‘werkstuk’ in het ergste geval nooit tot stilstand zal komen. Ik loste het op door een iets smaller ‘werkstuk’ te maken (zie foto's) dat bovendien een gat in het midden heeft zodat het na positionering door de naar buiten stotende as ‘doorboord’ kan worden. In de praktijk blijkt de positionering van dit werkstuk vrij precies te kunnen plaatsvinden.
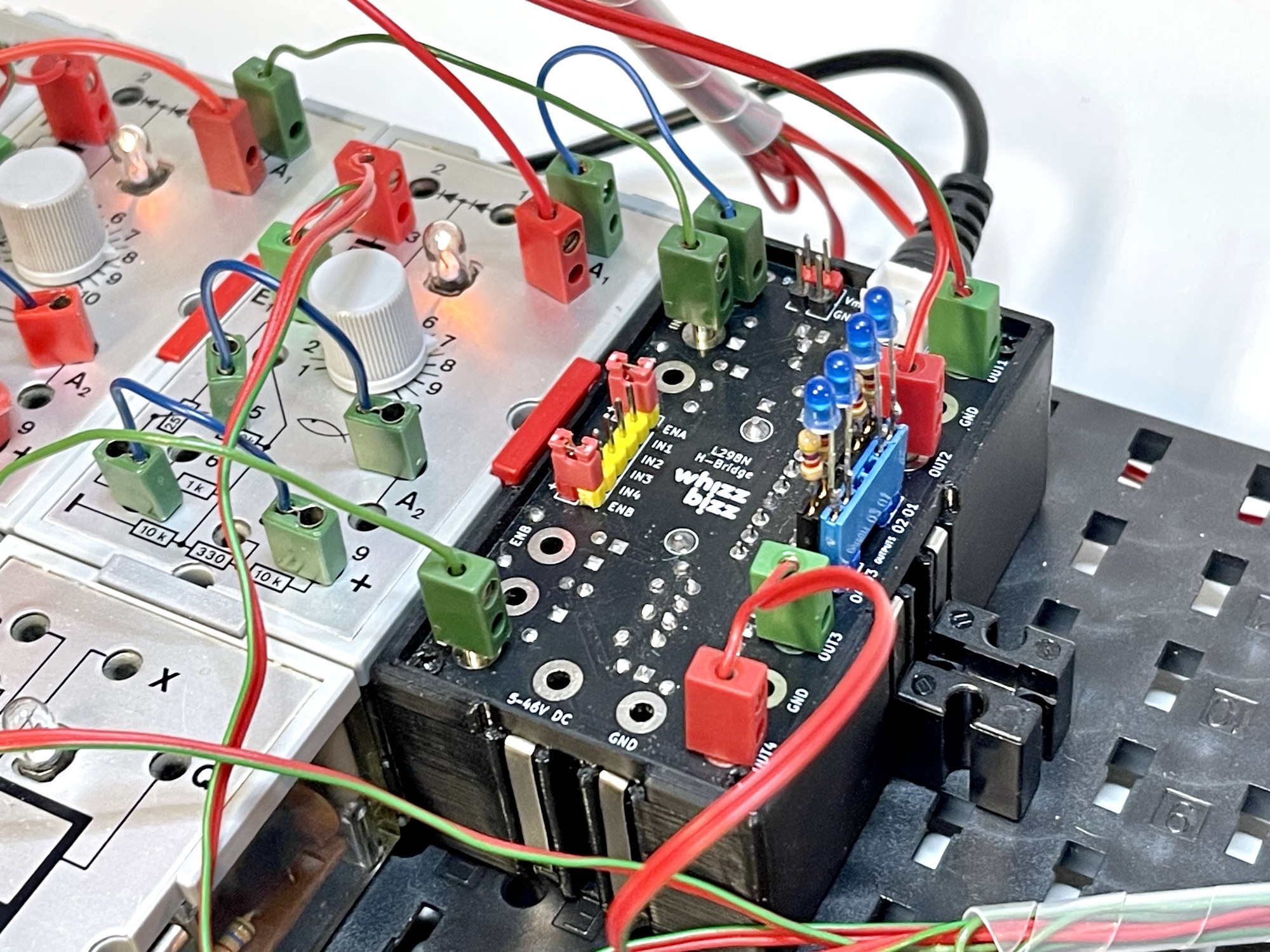
Zie de foto hierboven voor een detail van de module waarbij de H-Brug ‘Silberling’ de twee Relais Bausteine in de originele schakeling vervangt. Hier is ook zichtbaar hoe de ‘Enable’ ingangen geactiveerd zijn met een kleine jumper naar de naastgelegen ‘+’ van de Dupont-rail. Dit scheelt weer bedrading en pluggen. Aan de uitgangszijde, komen de Dupont-stekkerlijsten ook van pas. Er is daar een eenvoudige indicator met vier LED’s geplaatst. Deze extra is vanzelfsprekend niet noodzakelijk maar is erg gemakkelijk om een oogje te houden op de diverse motor-uitgangen tijdens het inregelen van de regeling. De motoren hoeven dan nog niet direct te worden aangesloten.
Functioneel vertonen beide H-Brugmodules veel overeenkomsten. De module de DRV8833 lijnt visueel meer aan met de traditionele Silberlingen, maar de modue met de L298N kan hogere motorspanningen aan. Inmiddels is in de praktijk gebleken dat de modules een uitstekende vervanging zijn van de bekende fischertechnik Relais Baustein. Een groot voordeel is dat de bedrading en aansturing van de draairichting bij het gebruik van een H-Brug veel eenvoudiger zijn. Door de aparte ingangen voor de twee draairichtingen en een heldere scheiding tussen in- en uitgangskant van de module blijft het overzicht behouden, is een foutieve draairichting sneller omgeplugd en is er veel minder kans op kortsluiting door bedradingsfouten. In dit model worden de separate ‘Enable’-ingangen voor het schakelen van de motor nog niet gebruikt. Maar in complexere schakelschema’s waar draairichting en het in- en uitschakelen van de motor separate functies zijn, scheelt dit opnieuw een relais module. Een verder voordeel is dat door de vele aansluitmogelijkheden het aanleggen van een externe motorspanning erg gemakkelijk is.