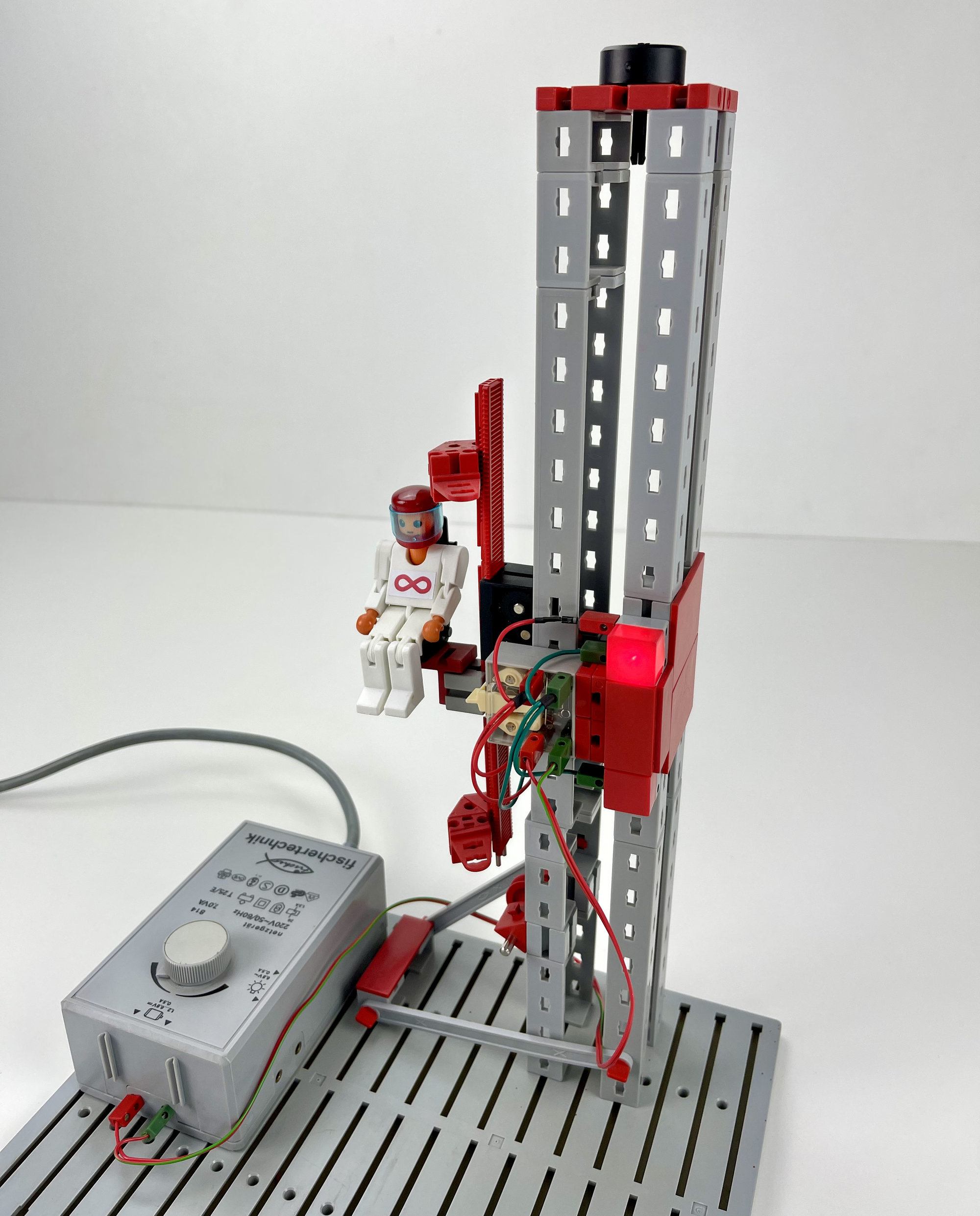
In dit artikel worden een paar algemene methoden van heen-en-weer en op-en-neer beweging beschreven. Ik probeer enkele aansturingen uit voor een op en neer gaand liftje.
In vorige knutselaerijen bouwde ik een kleine microcontroller voor gebruik bij de traditionele fischertechnik 'Silberlingen' die bij deze experimenten het gebruik van infrarood sensoren mogelijk maakte. Het was bovendien een goed model om te experimenteren met een geleidelijke snelheidscurve voor de motor.
De nieuwbakken magiër staat in de coulissen. De goochelstok is opgepoetst. De eerste toverspreuken zijn geleerd. Het is nog niet volmaakt, maar het grote goochelboek kan altijd weer worden aangevuld of verbeterd. Over luttele seconden zal hij een zaal vol oude bekenden zien waarmee hij mag samenwerken. Daar gaat het doek op. Het moment om zijn magische kunsten te tonen is aangebroken!

Een terugkerende uitdaging voor de bouwer van bewegende fischertechnik modellen is de heen-en-weer of op-en-neer beweging. Een liftje moet omhoog en omlaag, een karretje van links naar rechts, een schuifje open en dicht of een drukstang van voren naar achter. Hoewel voor de kleinere beweging tegenwoordig het gebruik van een servo voor de hand ligt, ontkom je voor een grotere slag niet aan het gebruik van een mechanische constructie of een motor die op de uiterste punten wordt omgepoold.
Het mooist is een oplossing met contactloze sensoren en waarbij de motor op zijn uiterste punten niet hard wordt omgepoold maar een geleidelijk toerentalverloop kent. In dit artikel beschrijf ik mijn zoektocht en onderzoek de rol die de magie van de Zauberling hierin zou kunnen spelen.
Een oplossing zonder enige hulp van electronica is de zuivere mechanische beweging. Met een ei-wiel, acentrisch draaiende stang of krukas-constructie (cardan) kan een roterende beweging worden omgezet in een lineaire. Ook in de fischertechnik Hobby-boeken, zoals in Hobby 1, band 2 ‘Geradshub Kurbelgetriebe’ (Engels: ‘Straight stroke crank’) op bladzijde 54, wordt dit principe mooi uitgelegd. De bewegingen van een naaimachine of decoupeerzaag zijn hiervan goede voorbeelden. Als de bewegende stang een andere stang met draaipunt aandrijft, onstaat een zwaaiende beweging zoals we die kennen van bijvoorbeeld onze ruitenwissers. Wie geïnteresseerd is, vindt in de ‘Elemente der Technik’-boeken in de bibliotheek op de website van de Nederlandse fischertechnikclub nog meer achtergrondinformatie (Elementen der Technik - Deel 1, blz 15).
Een zuiver mechanische methode is betrouwbaar en eenvoudig. De snelheid rond het ‘omkeerpunt’ van de schuifbeweging volgt een geleidelijk snelheidsverloop. De beweging op de uiterste punten van de beweging is niet abrupt of schokkerig. Hierdoor belast de traagheid van het bewegende (schuivende) deel de constructie minimaal. De draaibeweging heeft een vaste snelheid en de motor kan simpelweg één kant op blijven draaien. En omdat het zonder storingsgevoelige contacten of sensoren werkt, hoeven er geen beveiligingen te worden ingebouwd om te voorkomen dat de schuifbeweging onverhoopt buiten zijn uiterste grenzen komt en de constructie zichzelf ‘kapot draait’.
Voor een mechanische methode is echter wel relatief veel hulpconstructie nodig aan overbrengingen etc. Bovendien is de inbouwruimte relatief groot vergeleken met de relatief beperkte slag van de schuivende beweging.
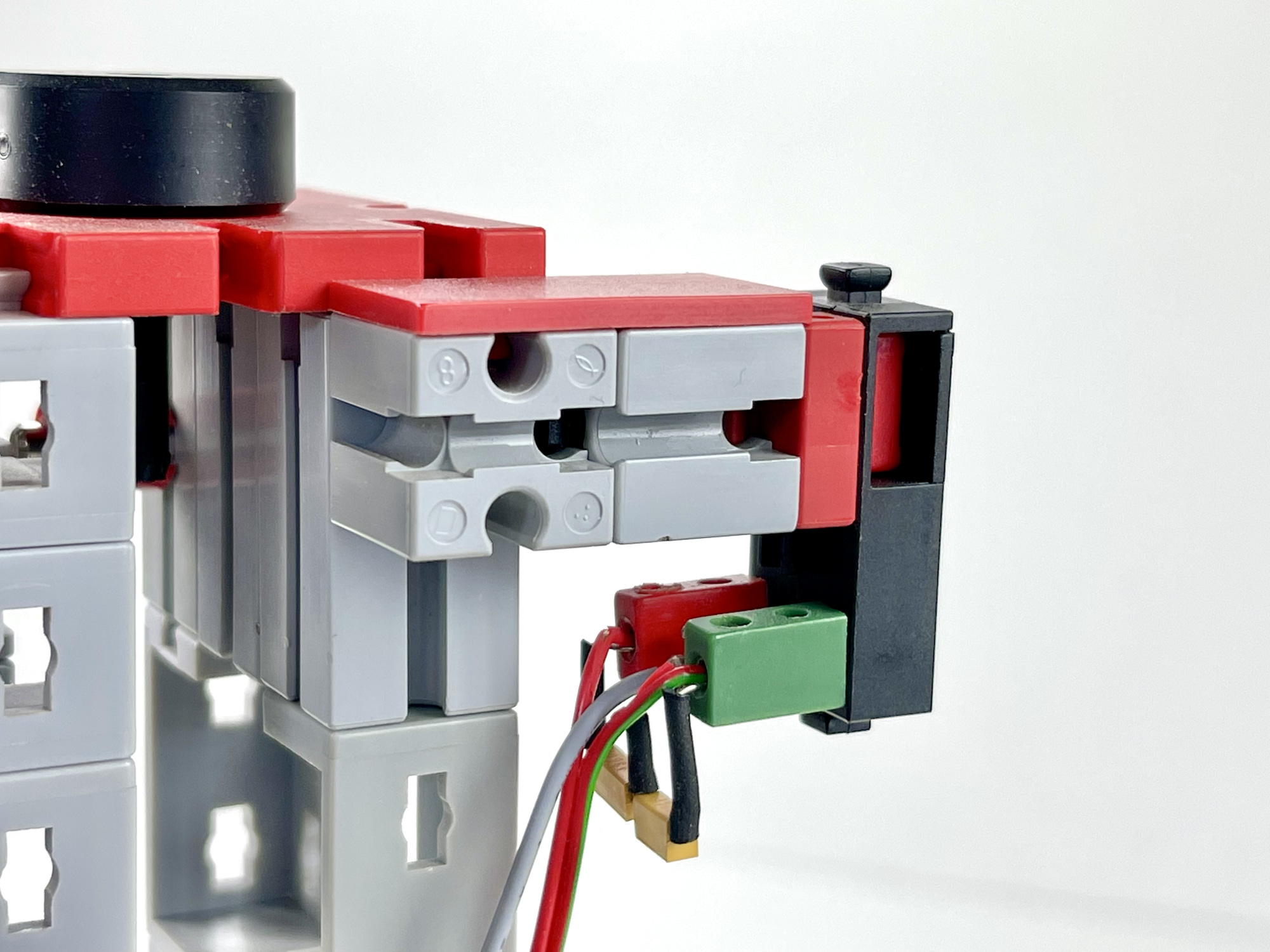
De eenvoudigste electromechanische oplossing is door het gebruik van een ompoolschakelaar. Als de bedrading voldoende bewegingsvrijheid heeft en de beweging relatief klein is, kan de ompoolschakelaar op het bewegende deel van de constructie worden gemonteerd. Voor langere trajecten kunnen stootnokken de langs het traject geplaatste schakelaar afwisselend bedienen. Een andere oplossing is een, aan het bewogen element bevestigd, touwtje door het heveltje van de omkeerschakelaar te laten lopen dat met knoopjes op de juiste plek de ompoolschakelaar bedient.
In tegenfase aangesloten LEDs kunnen direct afwisselend met de bewegingsrichting ter indicatie oplichten zonder veel extra bedrading. Natuurlijk kunnen we dit gedrag door toepassing van een paar diodes in de aansluitingen van traditionele gloeilampjes ook bewerkstelligen.
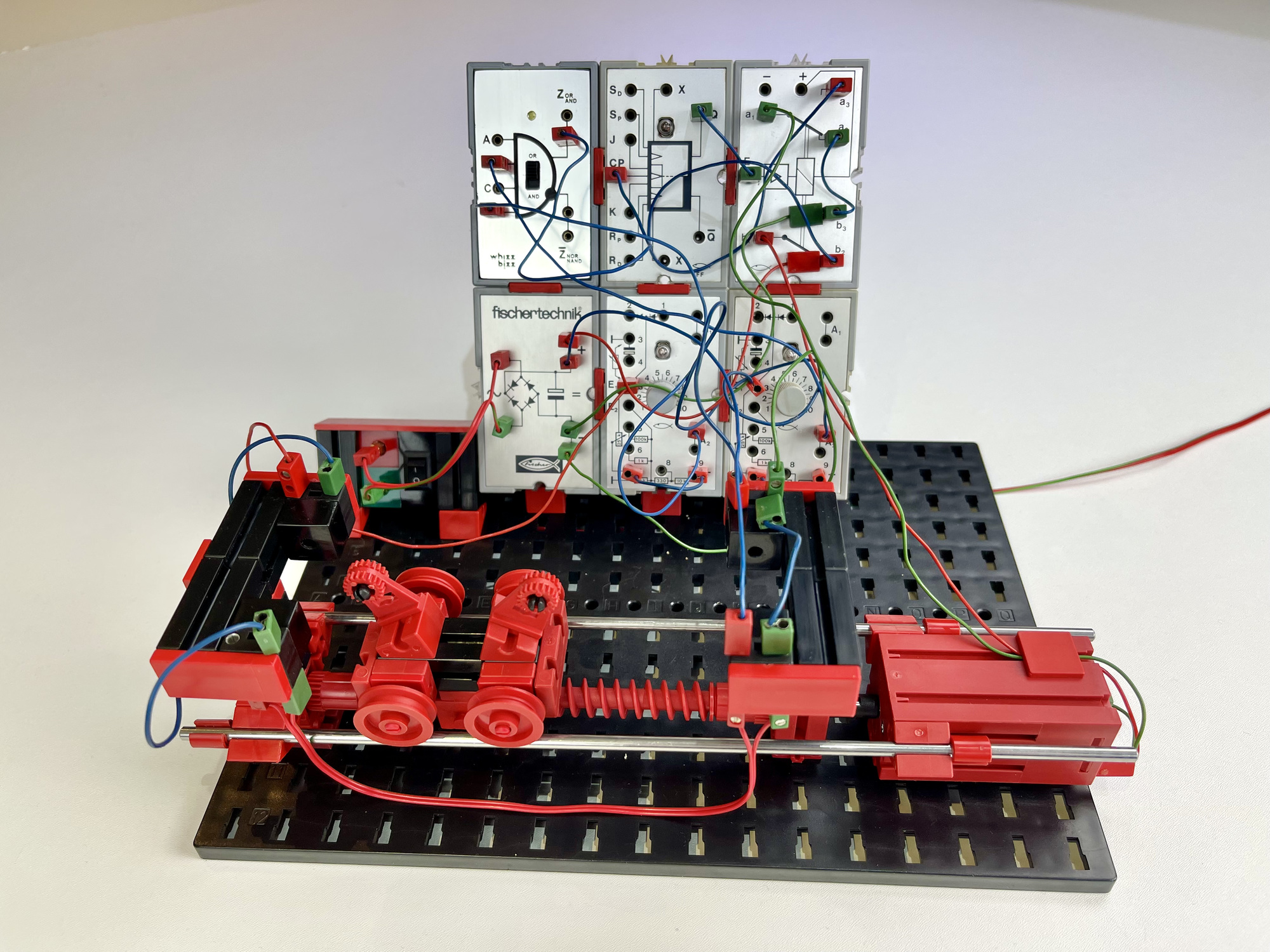
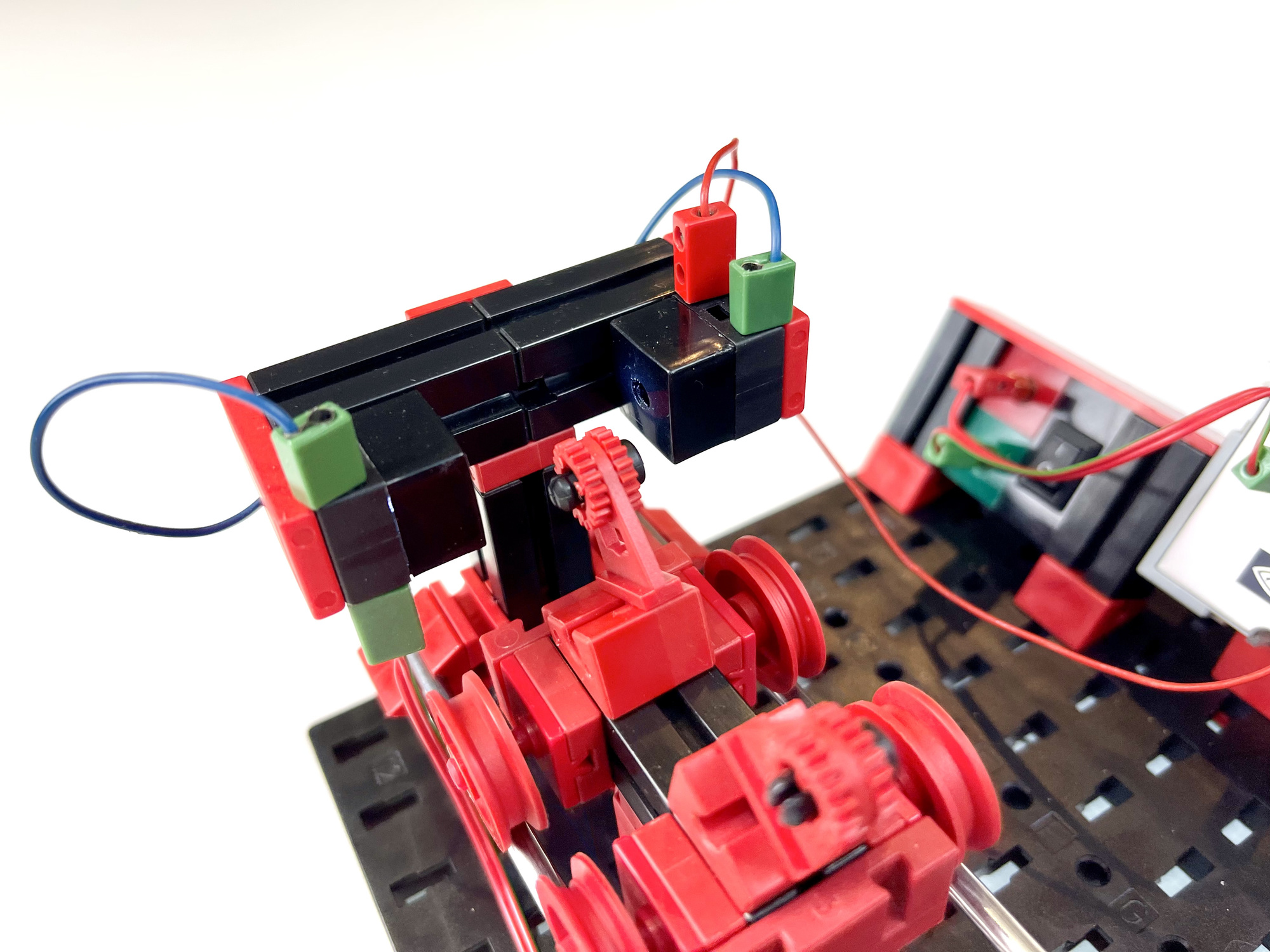
Wie nostalgisch is aangelegd, kan bovenstaande oplossing opbouwen met de traditionele ‘Silberlingen’ Flipflop h4 FF (30815) waarbij de Relais-bouwsteen h4 RB (30812) de voedingsspanning van de motor telkens ompoolt. Schakelaars (met ‘ontstoor’-consensators van 100nf, zie Hobby 4 deel 3 fig. 66.3 en 66.4) kunnen zó al op de Flipflop pulsingangen worden aangesloten. Voor contactloze sensoren, zoals foto-weerstanden of -transistors, waarvan de detectiedrempel moet kunnen worden ingesteld, lopen deze signalen via Elektronika Basisbouwstenen h4 G (30813). Theorie en talloze bouwvoorbeelden zijn te vinden in het boekje van het ‘IC Digitaal Praktikum’ of Hobby 4, Band 3.
In dit experiment werden als limiet-sensoren foto-weerstanden gebruikt, maar hiervoor kunnen natuurlijk ook foto-transistors als lichtsensor worden gebruikt. Een andere contactloze manier van eindpunt-detectie is mogelijk met de magneetschakelaar.
Met mechanische impulsschakelaars of magneetschakelaars op de uiterste punten van de beweging kan een elektronische oplossing met de flipflop Silberling worden gemaakt. We kunnen hiervoor de flankgevoelige ingangen Sp en Rp gebruiken. Vergeet echter niet de storingsonderdrukking met een 100 nf condensator tegen schakelruis en stoorimpulsen die bij mechanische impulsschakelaars kunnen optreden.
Bij het gebruik van contactloze sensoren zoals een foto-weerstand of foto-transistor kan de drempeldetectie met de fischertechnik Elektronika Basisbouwstenen worden ingesteld. De beide uitgangssignalen van de Elektronika Basisbouwsteen kunnen via een OR-poort aan de Cp worden verbonden zodat de sensoren als toggle gaan werken.
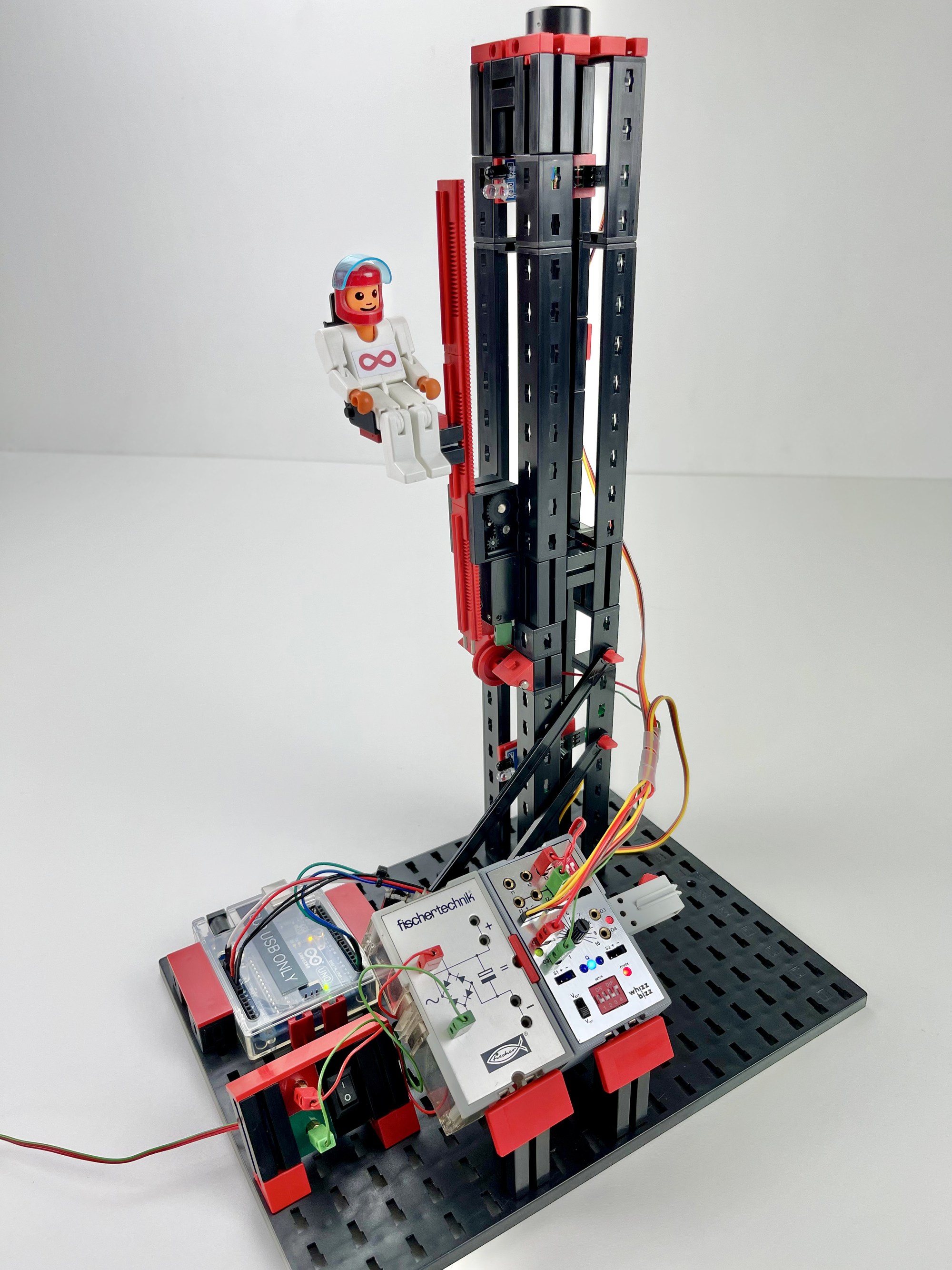
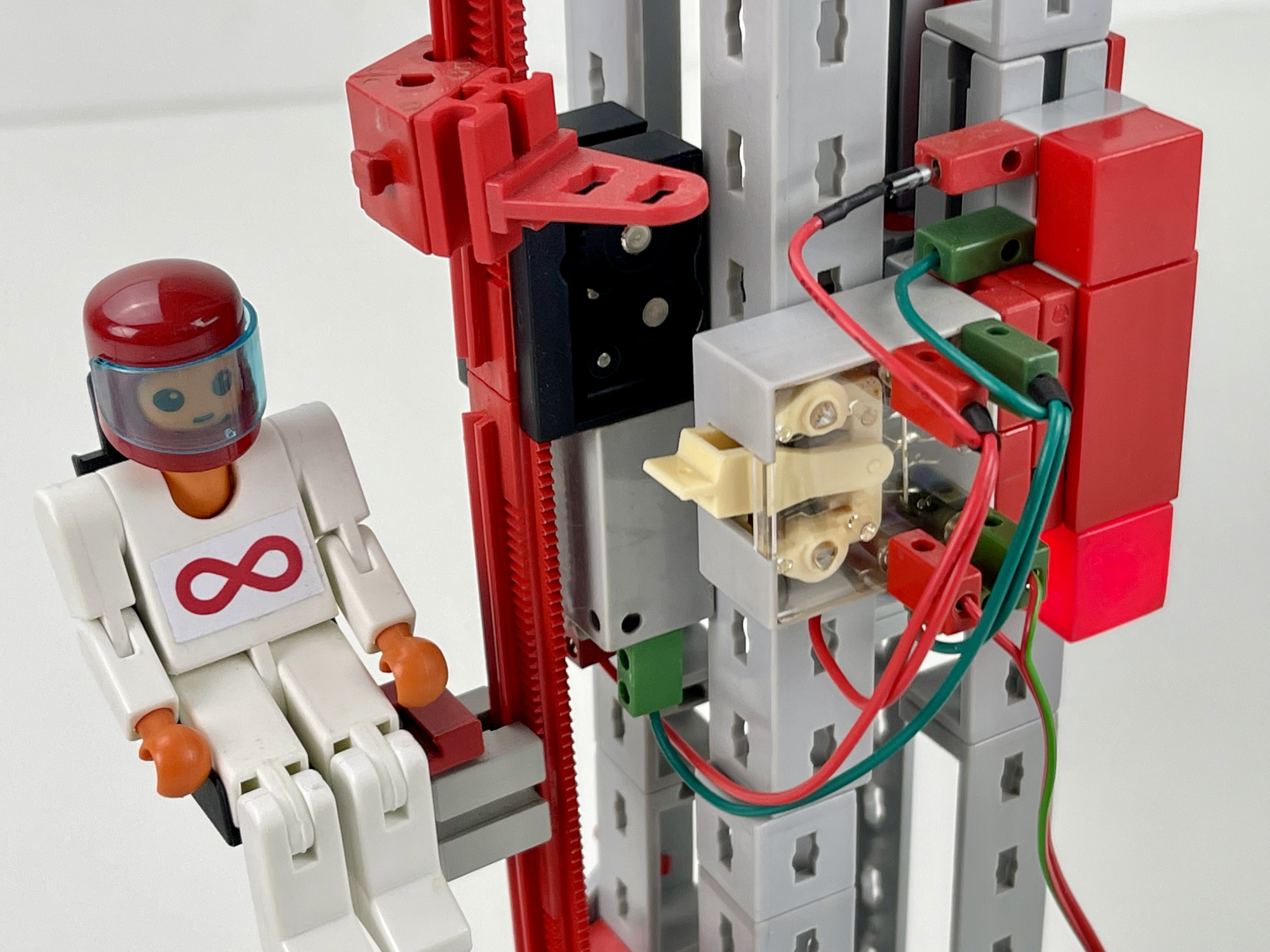
Het leek me een leuk experiment in plaats van een licht poortje, een tweetal IR-obstacle sensoren voor het detecteren van de eindpunten te gebruiken. Dit zijn ‘active’ sensoren die een voedingsspanning van 5 volt vereisen en in rust hun voedingsspanning uitgeven op de uitgang. Zodra een object binnen de, op de module instelbare, afstand wordt gedetecteerd, daalt deze uitgangsspanning naar nul. Dit is in principe dezelfde negatieve logica die de Silberlingen hanteren.
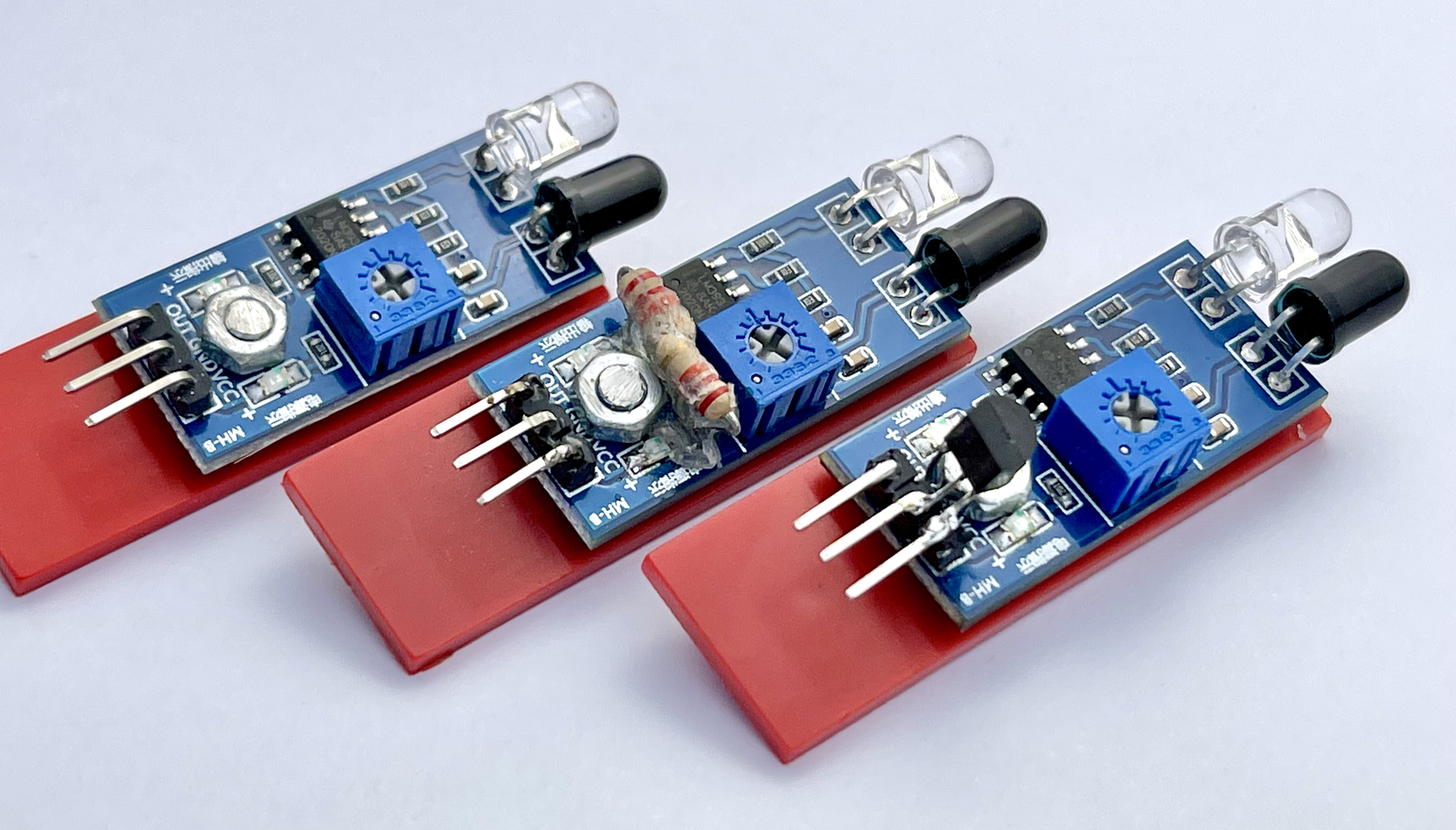
Een bijkomend voordeel is zelfs dat deze modules electronisch zonder grote problemen op een hogere voedingsspanning, zoals de 9 volt van de Silberling, kunnen werken. De op de module gebruikte LM393 voltage comparator kan volgens de datasheet zelfs probleemloos tot 36 volt aan. Het enige probleem is dat de twee smd-LEDs op het printje zijn ingesteld op 5 volt en wel heel erg fel oplichten bij een spanning van 9 volt. En deze visuele detectie-feedback is juist erg handig, dus het zou jammer zijn als ze hierdoor kapot branden.
Om deze sensoren geschikt te maken voor gebruik met de Silberlingen (of de TXT-controller) probeerde ik twee verschillende modificaties, die beiden prima functioneerden:
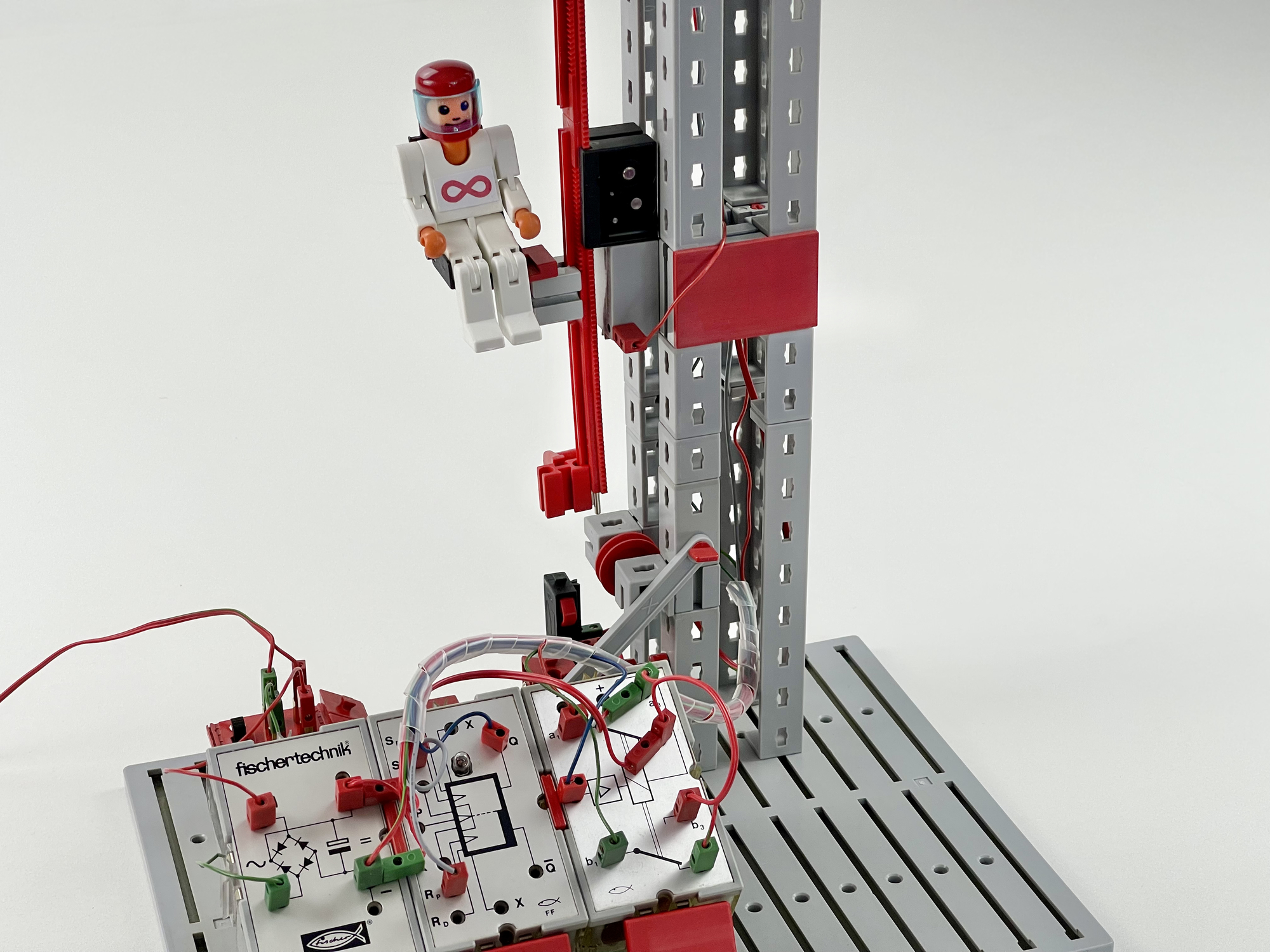
Na een korte test waarin ik de foto-weerstanden uit het vorige model met de Silberlingen verving door de gemodificeerde IR-obstacle sensors, kwam de Zauberling ten tonele.
Hiermee konden een aantal punten worden verbeterd:
De Zauberling loste enkele praktische problemen als bij toverslag op. Zijn flexibel te gebruiken ingangen maken het mogelijk te experimenteren met praktische sensoren buiten het bekende fischertechnik programma. De geleidelijke draairichtingswisselingen worden door de fischertechnik motoren zeer gewaardeerd en zouden niet zo eenvoudig met discrete elektronica kunnen worden gerealiseerd.
Het is een mooie eerste truc van de Zauberling. Ik ben benieuwd wat hij verder nog uit de hoge hoed zal toveren in de toekomst. Aan de samenwerking met de Silberlingen zal het niet liggen, hij is inmiddels liefdevol opgenomen in deze traditionele fischertechnik familie en Mr. Lemniscate stond er op dat hij mocht plaatsnemen op het zo heerlijk geleidelijk ‘zwevende’ stoeltje.