
Ik besloot een tweede module te bouwen met de L298N. Deze populaire H-bridge chip wordt al jaren veelvuldig gebruikt voor allerhande toepassingen en mist de eerder beschreven 'rem'-logica van de DRV8833 en TB6612. Als IN1 en IN2 allebei HIGH zijn, zijn de betreffende uitgangen OUT1 en OUT2 dus ook gewoon HIGH. Dit wordt doorgaans een langzame rem genoemd. De motor staat hierbij ook vrij snel stil, maar niet zo abrupt als wanneer de motorwikkeling wordt kortgesloten, zoals met de DRV8833 mogelijk is. Een voordeel is echter dat de vier uitgangen van de L298N chip door dit gedrag desgewenst ieder als onafhankelijke driver-uitgang gebruikt kunnen worden. Dus niet alleen als twee volledige H-Bridges voor het aansturen van twee motoren, maar ook als een combinatie van één H-Bridge en twee onafhankelijk gebruikte driveruitgangen, of desgewenst dus zelfs als vier onafhankelijke uitgangen.

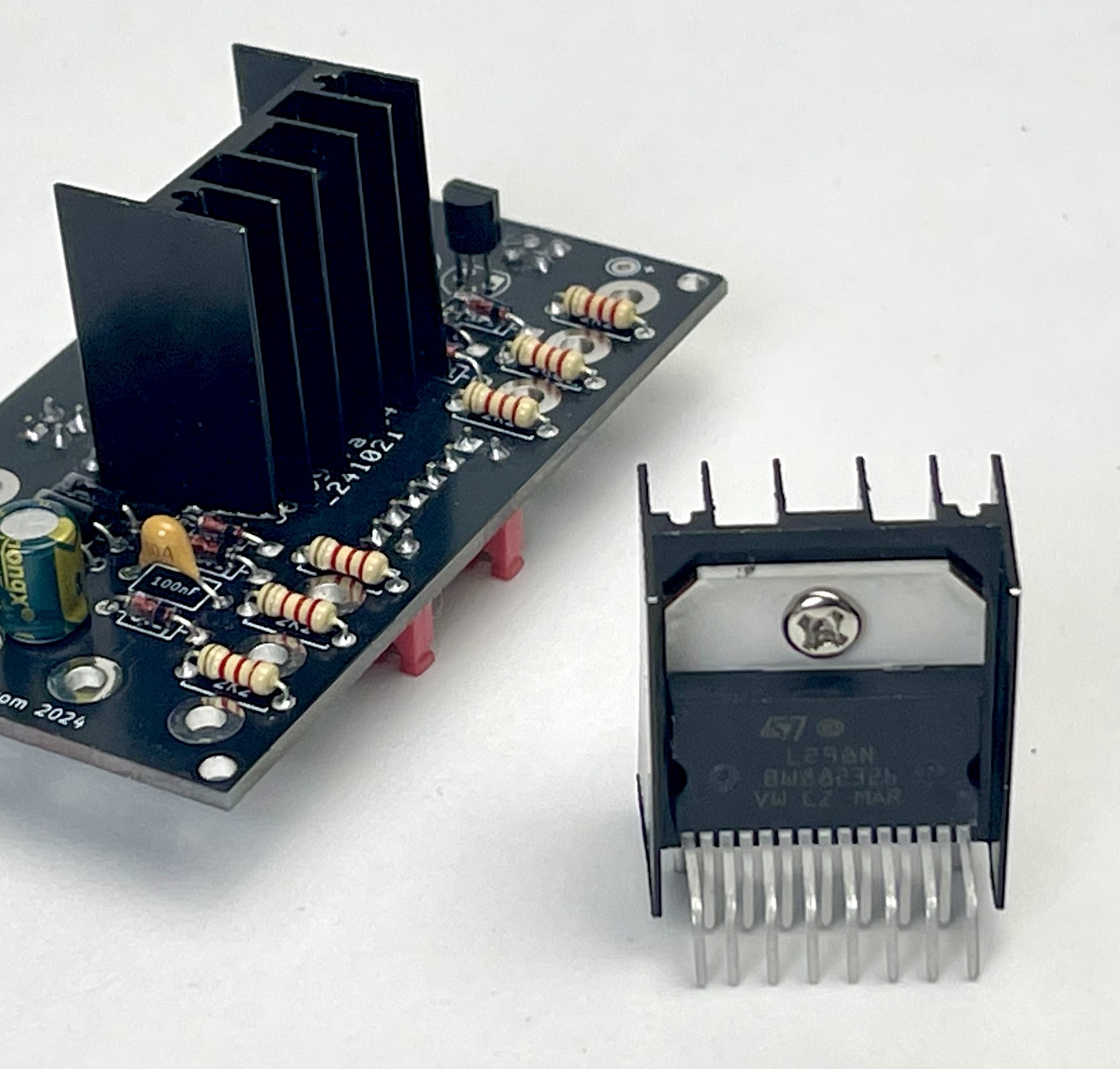
Daarbij heeft de L298N het voordeel dat de maximaal aangeboden motorspanning een stuk hoger mag liggen (tot 48 volt!) waardoor de stroom en warmteontwikkeling bij het gebruik van een zwaardere motor lager kan blijven. Desalniettemin kan op de L298N een veel groter koellichaam worden gemonteerd. Al met al kan op deze wijze een wat meer industriële oplossing worden verkregen die met de bekende fischertechnik motoren niet te minste moeite zal hebben, maar die het ook mogelijk maakt industriële 24 volt motoren te gebruiken.
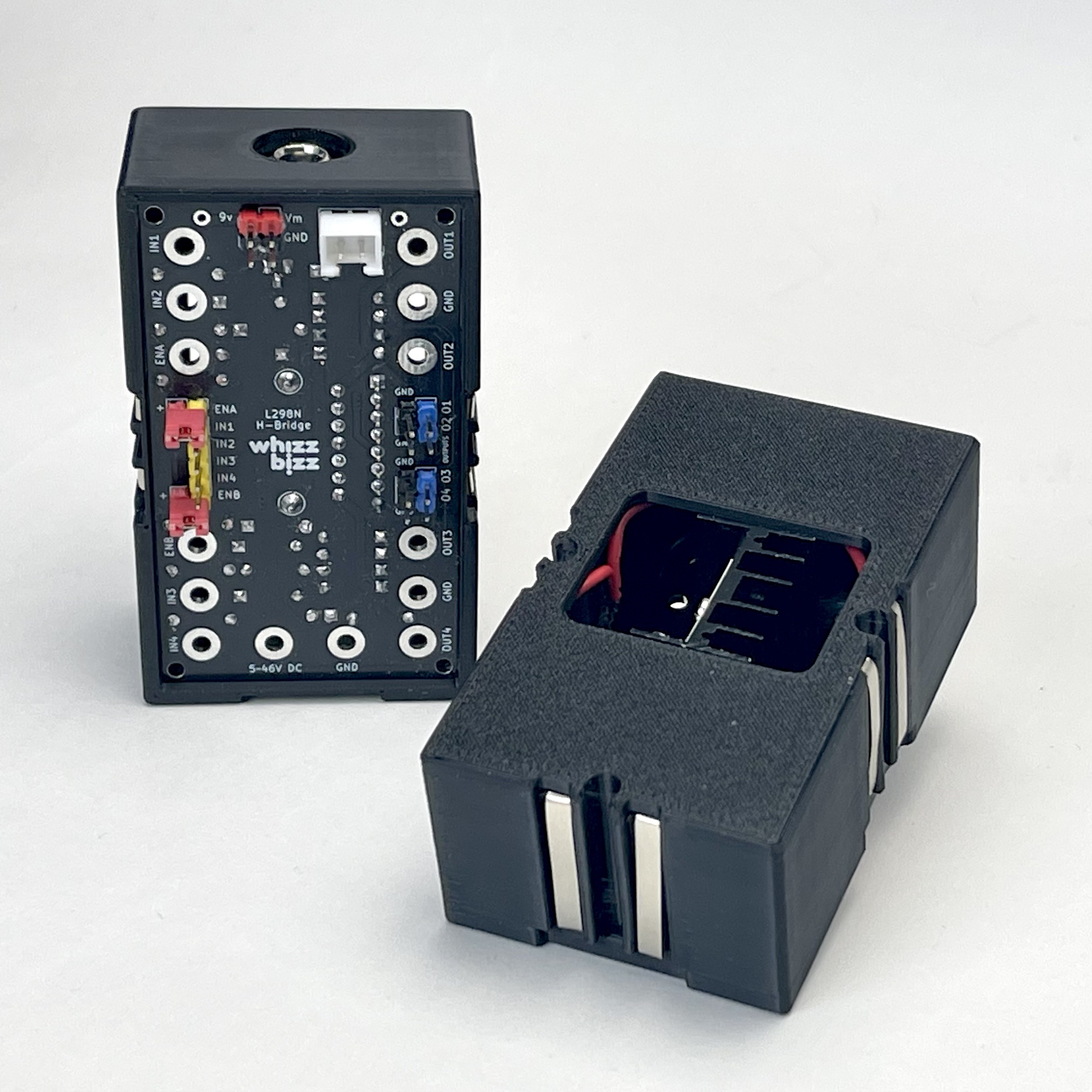
Ik besloot voor deze tweede module de praktische opbouw te wijzigen. Hierdoor ziet deze module er anders uit dan de voorgaande. De gesloten frontplaat met opschriften en gesoldeerde stekkerbussen verviel. Om het gebruik van de fischertechnik stekkers te faciliteren, koos voor 2.5 mm gaten en voerde alle in- en uitgangen dubbel uit met Dupont pin-headers. De twee 'enable'-ingangen kunnen op die manier eenvoudigweg door het plaatsen van een jumper HIGH worden getrokken als een apart stuursignaal voor het in- en uitschakelen van de motoren niet nodig is.
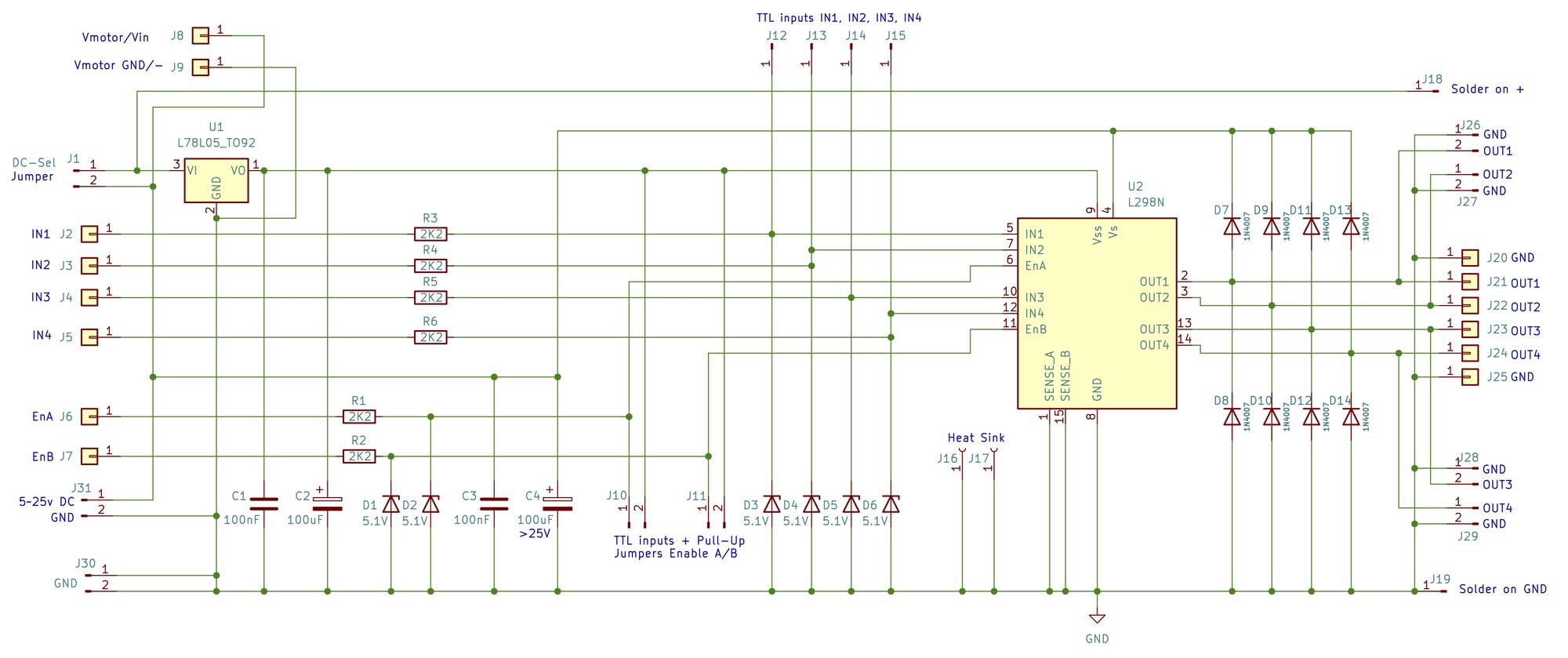
Tevens voegde ik een JST connector en aparte aansluitingen voor de motorspanning toe. Bovenin de behuizing kwam een DC-connector voor een externe DC-adaptor zodat de motorspanning desgewenst eenvoudig extern kan worden betrokken. Zolang geen externe motorspanning nodig is, kan door middel van een jumper de motorspanning van de uitgangen ook direct uit de normale ‘Silberling’-stroomvoorziening van de metalen strips aan de zijkant van de module worden betrokken. Deze jumper dient te worden verwijderd als een externe motorspanning wordt aangeboden. Voor de 5 volt voedingsspanning van de chip zelf is op de print een kleine spanningsregulator opgenomen. Deze begrenst echter de optioneel aangeboden externe voedingsspanning ingangsspanning tot maximaal 35 volt. Voor de genoemde 24 volt motoren is dit vanzelfsprekend ruim voldoende. Hieronder is het schakelschema geschetst.
Ondanks deze grote visuele verschillen is de module nog steeds 100% compatible met de diverse (TXT-)controllervarianten en traditionele elektronicamodules van fischertechnik. Met een enkele module is het op deze manier mogelijk meerdere fischertechnik relaismodules te vervangen.
In oude documentatie vond ik een goed model om de H-Brugmodule eens in de praktijk te testen. Klik hier door naar een praktische toepassing...