
In de jaren zeventig van de vorige eeuw produceerde fischertechnik de zogenaamde 'Silberlingen'. Iedere kleine module had een eigen functie, uitgevoerd in (de toenmalige) elektronica. De modules konden aan elkaar gekoppeld worden om samengestelde functies te maken en te experimenteren met en leren over de wondere wereld der elektronica.
Ze hebben zeker bijgedragen aan mijn interesse in elektronica. In mijn jeugd had ik echter maar weinig van deze modules. Nu, bijna een halve eeuw later probeer ik een backwards-compatible variant te maken met een Atmega328P microcontroller. De uitdaging is iets te knutselen dat kan samenwerken met het traditionele erfgoed van weleer.
De 'Silberling' was lang geleden voor velen de kennismaking met de ongrijpbare magische wereld der elektronika. Deze tovenarij is inmiddels uitgebreid met hedendaagse alchemisten zoals microcontrollers en computers. Toch mijmert een moderne tovenaarsleerling over aansluiting met de magiërs van weleer. Zou er een magische brug kunnen worden geslagen tussen beide universa? In dit eerste deel duiken we in het wormgat en kijken we naar de mogelijke hardware voor zo'n tovenaarsleerling. Want hoe kan een leergierige magiër verwonderen en betoveren zonder de juiste attributen? De toverstaf moet in orde zijn!
Hoewel inmiddels zo'n vijftig jaar oud, de traditionele fischertechnik Silberlingen blijven magische doosjes. Velen werden ooit betoverd door hun magie en ook vandaag de dag blijft het experimenteren met de klassieke functionaliteit van discrete elektronica aanlokkelijk. Al was het alleen maar om oudere experimenten uit originele documentatie eens in werkelijkheid te gaan bouwen. Dus hoewel het zilver van de Silberingen soms inmiddels wat vergeeld is, zijn ze nog niet compleet vergeten. Integendeel. Het blijkt zelfs dat het nabouwen er van tot de verbeelding spreekt.

Veel 'fischertechnikers' gebruiken inmiddels modernere technieken bij de experimenten. En ook fischertechnik zélf evolueerde mee. Na dozen als het Elektronik Praktikum, het Hobbylabor en het IC-Digital-Praktikum volgden interfaces voor microcomputers en uiteindelijk een programmeerbare controller die rond deze tijd zijn nieuwste incarnatie krijgt. Daarnaast groeit natuurlijk het aanbod van Arduino gebaseerde microcontrollers waarmee bijna alle discrete functies en automatiseringsvraagstukken, geheel zonder het pluggen van stekkertjes, softwarematig programmeerbaar kunnen worden opgelost.
Desondanks blijft het lonken om hardwarematig te kunnen programmeren met draadverbindingen en stekkers met een modulair systeem als de vertrouwde Silberlingen. Met de E-Tec-, Elektronik- en Robotics-modules gaf fischertechnik de directe compatibiliteit met dit erfgoed echter op. In deze modules keren dan weliswaar de diverse logische functies terug, toch voelen ze voor de ware ontwikkelaar te beperkt omdat ze niet zelf van eigen aangepaste of aanvullende programmatuur kunnen worden voorzien.
Het idee was geboren eens te onderzoeken of het traditionele domein van de Silberlingen met de kracht van microcontrollers kan worden uitgebreid. Met wat moderne alchemie zou er een, zowel letterlijk als figuurlijk, verbindende module moeten kunnen worden gebouwd. Een nieuwe Silberling die qua vormfactor, digitale logica en analoge spanningsniveau's terugwaards compatible is. Een module waarmee het mogelijk wordt, naast de klassieke omschakelaar, foto-weerstand en modernere foto-transistor, ook meer hedendaagse sensoren als IR-obstacle detectors of hall-effect sensoren te kunnen gebruiken. Het mooist zou het zijn als deze de drempelwaarden van sensoren zelf uitzoekt en TTL-niveau’s kan combineren met de 9 volt ‘negatieve logica’ wereld van de klassieke Silberling. Als zo'n module ook zwaardere verbruikers direct zonder relais kan aansturen, en misschien zelfs meteen ook servo's kan laten bewegen, begint het al heel magisch te worden!
Geïnspireerd door de experimenten van anderen bouwde ik ook enkele flipflops en omschakelbare AND/OR-poort Silberlingen na. Maar naarmate ik meer thuis raakte in de wereld van de microcontrollers, werd de wens direct met de Silberlingen te kunnen samenwerken steeds sterker. Er tekende zich een flexibele en programmeerbare Silberling voor specifieke eigen toepassingen af.
Een dergelijke tovenaar zou naadloos moeten kunnen samenwerken met de klassieke Silberling-exemplaren. En door de programmeerbaarheid, zou deze tovenaarsleerling telkens nieuwe trucs aangeleerd kunnen worden waardoor de functionaliteit van de genoemde fischertechnik-modules kan worden aangepast en verbeterd. Een heuse tovenaarsleerling dus, een echte ‘Zauberling’... ('Zauberen' betekent 'Toveren' in de Duitse taal)
Op de foto hiernaast ziet u waartoe dit soort dagdromen en geknutsel kunnen leiden.

De aansturing van Mr. Lemniscate bouwde ik eerst met de klassieke Silberlingen op, maar het bleef nogal als een omweg aanvoelen de spoel van een relais-magneet te moeten bekrachtigen om vervolgens een andere elektromagneet te laten werken. Afgezien van het overbodige geluid en de slijtage aan de contacten, diende het schakelmoment bijvoorbeeld enkele graden te worden verdraaid om te compenseren voor de ‘dubbele vertraging’ die het achtereenvolgens bekrachtigen van de twee magneetspoelen vergde.
Bovendien werd het duidelijk dat de 9 volt spanningsverzorging van de fischertechnik gelijkrichtermodule niet toereikend was voor de zwaardere elektromagneten die in het model gebruikt werden. Dit leidde tot een zelfbouw toerentalregeling en flipflop-module in fischertechnik cassettes (nr. 35359). De flipflop-module kreeg driver-uitgangen waarmee direct een elektromagneet of motor kon worden aangestuurd zonder aanvullende relais-module. De externe voedingsspanning hiervan kan met stekkertjes worden doorgelust. Dit houdt het front vrij van de hiervoor noodzakelijke doorlus- en aansluitsnoeren.
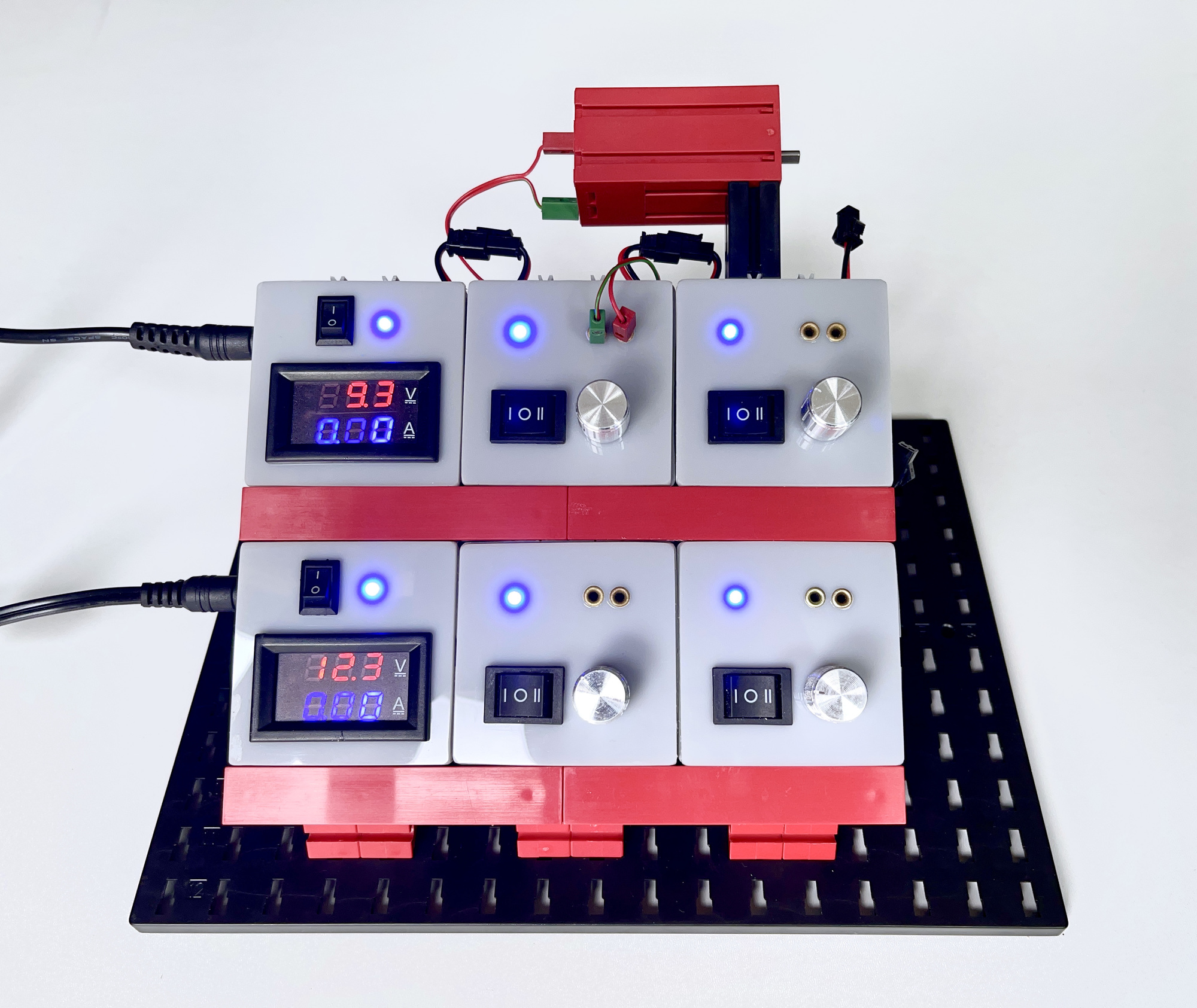
Hetzelfde principe paste ik toe bij een algemeen bruikbare ‘voedingslijn’ met toerentalregelingen die ik in fischertechnik cassettes onderbracht. Dat leidde uiteindelijk tot het paneeltje op de foto hiernaast.
Bij het bouwen inspireerden diverse artikelen en gerealiseerde producten van andere fischertechnik knutselaars. Uit de levendige discussies op het fischertechnik forum over dit onderwerp bleek ook dat de Silberlingen nog steeds erg tot de verbeelding spreken.
De in de bestaande fischertechnik bakjes gebouwde modules, combineren echter niet altijd optimaal met de traditionele Silberlingen. Het aanbieden en doorlussen van de noodzakelijke stroomvoorziening vergt, door de relatief grote fischertechnik aansluitstekkers, dikwijls onevenredig veel ruimte. Terwijl een elegante technische eigenschap van de Silberlingen juist is, dat de noodzakelijke distributie van de stroomvoorziening niet tussen de aansluitingen en bediening op het front hoeft te worden gemaakt: de verzorgingsspanning kan worden doorverbonden met tweepolige verbindingsclips.
Voor veeleisender stroomverbruikers als elektromagneten en motoren moet het echter mogelijk zijn een externe voeding aan te sluiten zodat deze via de vermogensuitgangen traploos kunnen worden aangestuurd zonder deze reguliere stroomvoorziening onnodig te belasten.
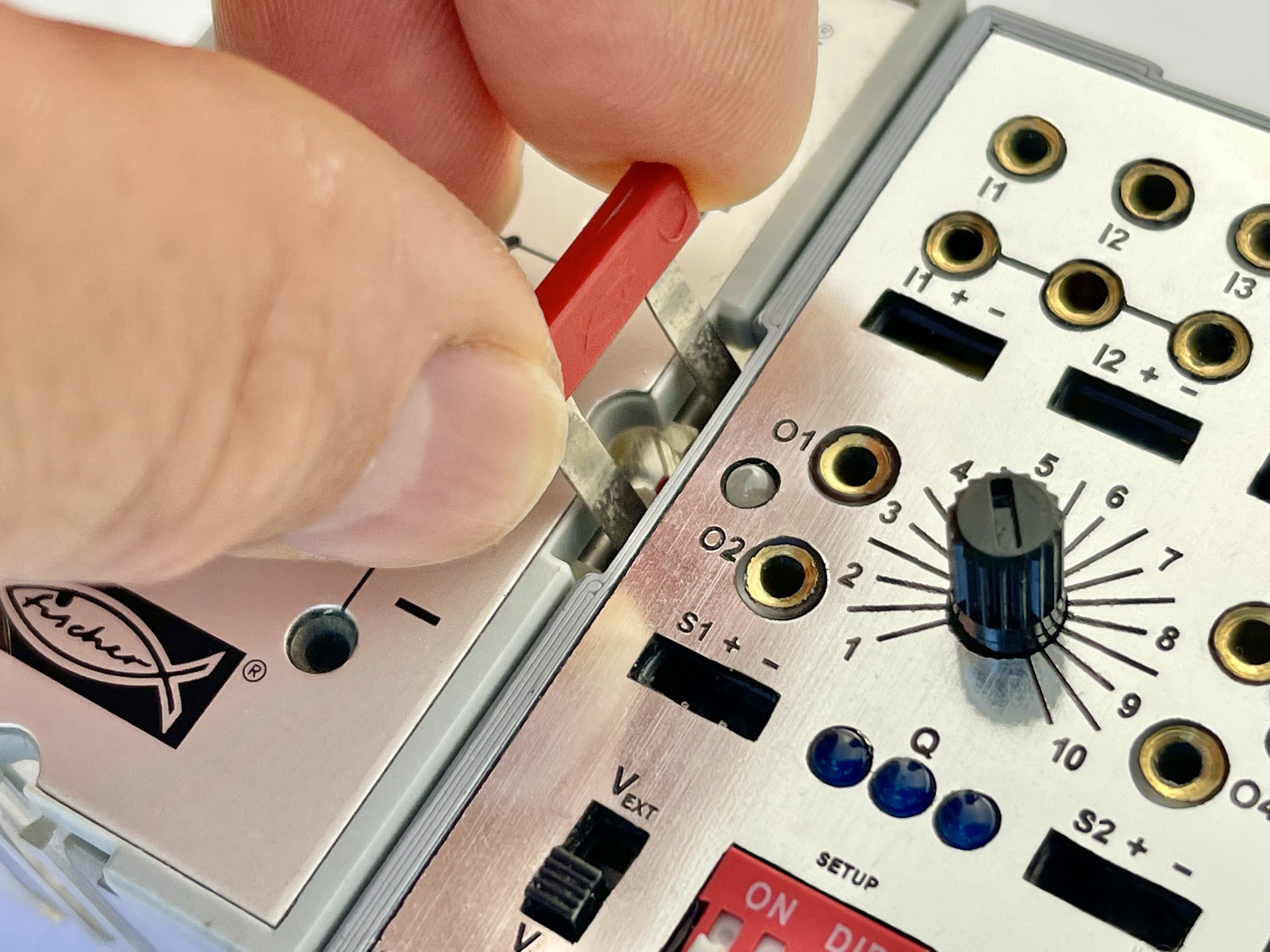
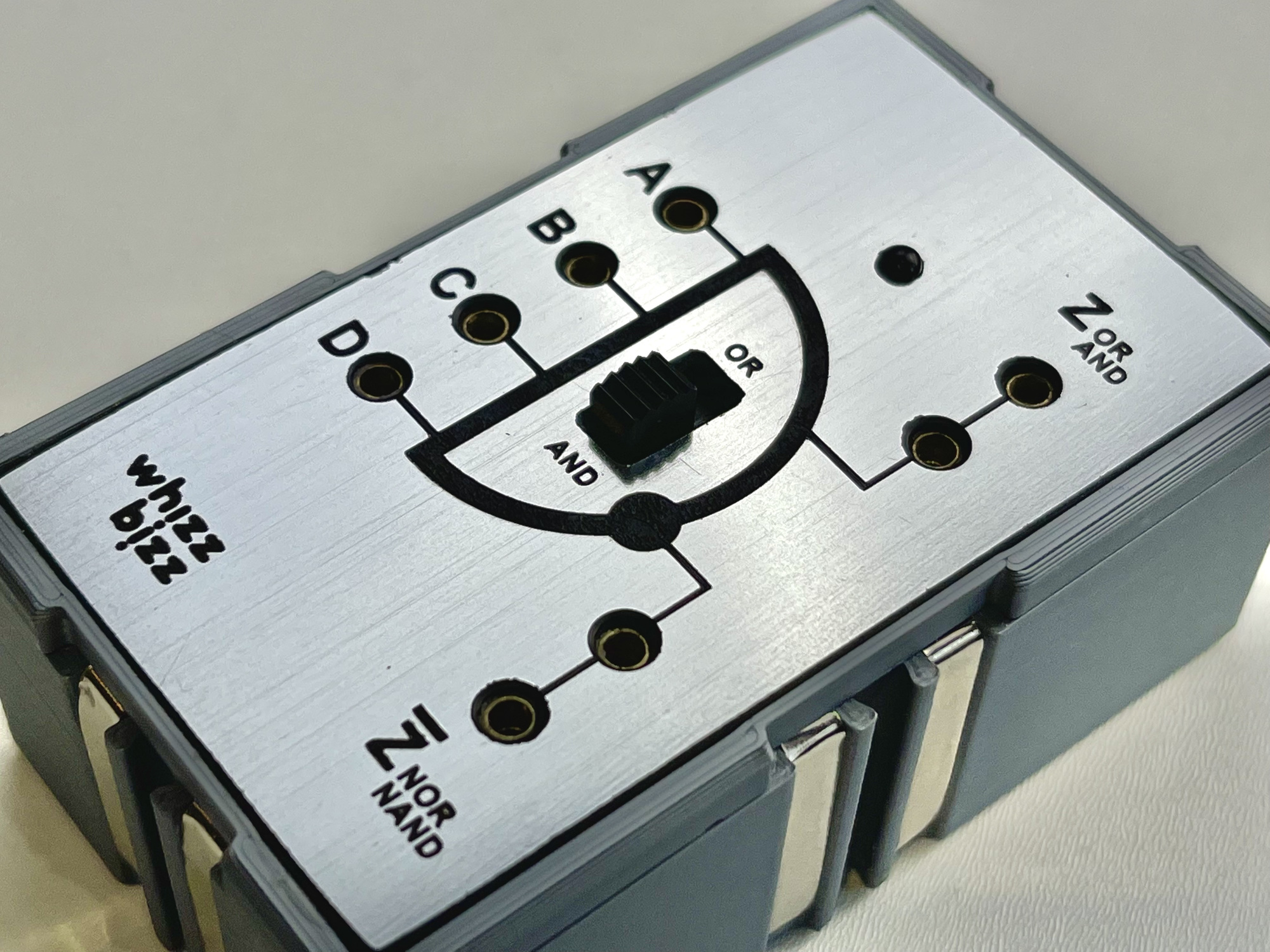
Intussen had ik enkele uitstekende 3D Silberling-ontwerpen gecombineerd en gemodificeerd in Blender zodat de laatste wens hierboven reeds kon worden gerealiseerd. Zie het 3D ontwerp dat ik op Thingiverse publiceerde. Ik bouwde er een omschakelbare AND/OR mee die nog geen externe voeding vereiste en zich op deze manier direct uit de gelijkrichterbouwsteen h4 GB van stroom kon laten voorzien. Op dit punt was de compatibiliteit met de Silberlingen dus reeds gelukt.
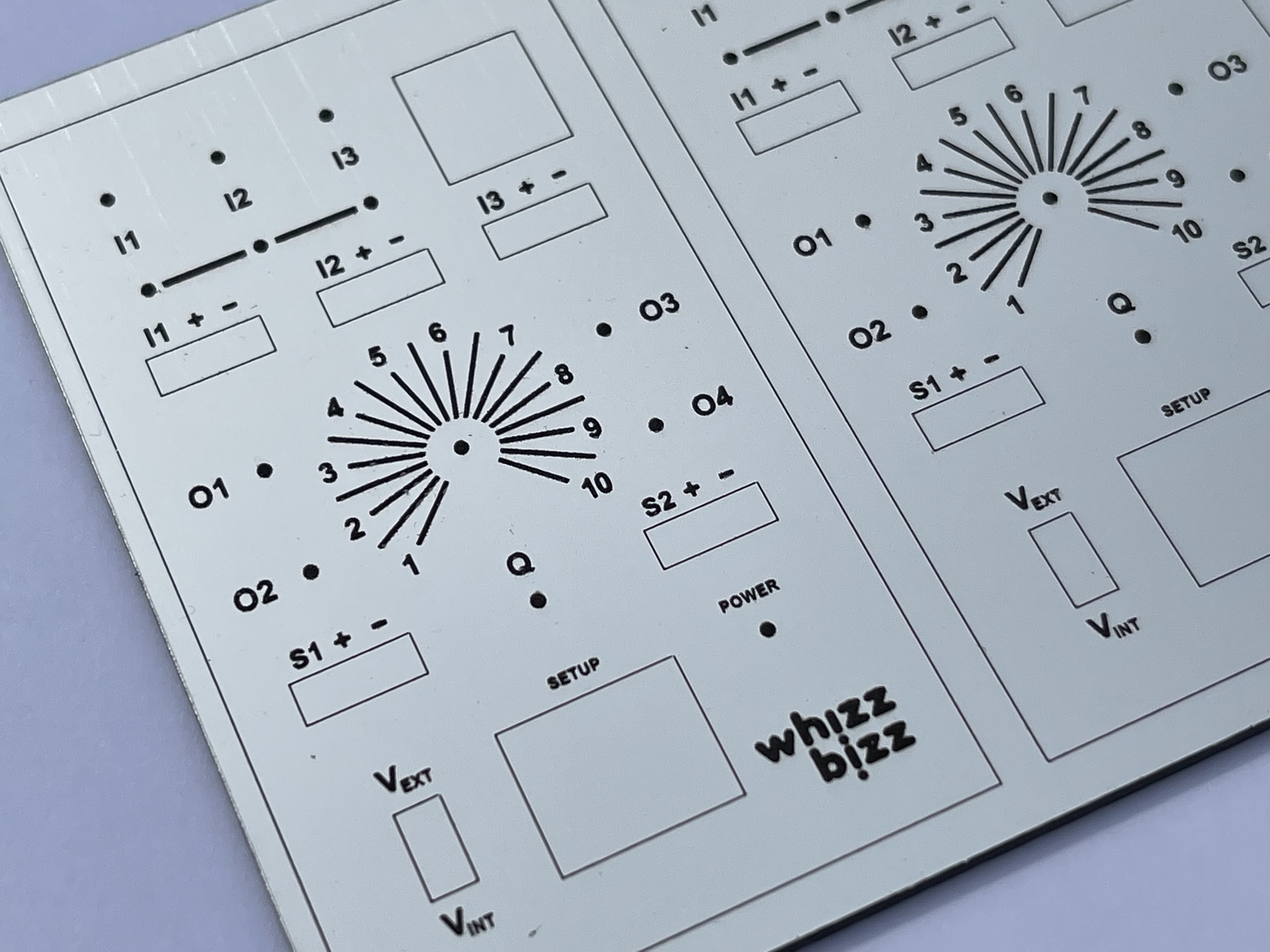
Het resultaat begint al behoorlijk op de Silberlingen te lijken. Maar de zoektocht naar het meest ideale materiaal voor het maken van de frontplaten is nog niet ten einde. Het oorspronkelijke materiaal is geanodiseerd aluminiumplaat waarin de afbeelding fotografisch is geëtst. Ik heb echter nog geen adres gevonden waar men betaalbaar enkele stuks kan laten produceren.
Behalve dat hij de 3D behuizingkjes professioneel voor mij kon printen, experimenteerde mijn vakkundige vriend Dimitri Modderman met diverse materialen en lasers voor de frontplaatjes. We hebben nog niet meest geschikte materiaal gevonden waarbij één laser zowel de bijschriften als de gaten strak en netjes kan laseren.
Voor het prototype werd het 2,6 millimeter dik zwart plasticplaat met een toplaag van flinterdunne zilverkleurige folie. Dit materiaal blijkt erg kwestbaar bij het boren en zagen van de vierkante openingen. Bovendien glimt dit materiaal meer dan de originele Silberlingen. Kortom, het resultaat is reeds erg fraai maar we blijven uitkijken naar een nóg geschikter materiaal waarbij ook direct alle gaatjes en openingen door de laser kunnen worden gemaakt.
De mogelijkheden van de gangbare microcontrollers, maar ook de traditioneel door fischertechnik in bijvoorbeeld de E-Tec module geboden functionaliteit, bleef me bezighouden. Ik liet mijn fantasie daarom de vrije loop, droomde mijn ideale magische Silberling en had al snel een lijstje met wensen:
De binnenruimte van een Silberling-behuizing meet slechts 38 bij 68 millimeter. Hierdoor is de reguliere Arduino Uno met zijn 53.4 x 68.6 mm al te breed. Om nog maar te zwijgen van de nog grotere varianten als de Mega en de Due (53.4 x 101.52 mm). Een Raspberry Pico, ESP32 of Arduino Nano past, maar de beste verhouding tussen het aantal beschikbare input/output pennen en afmetingen gaf de Arduino Compatible Pro Mini Atmega328P. Dit is een extreem kleine Arduino, die net als de Arduino Uno bij 5V op 16 Mhz draait en vanuit de, voor de meeste ontwikkelaars, vertrouwde Arduino IDE omgeving op de computer geprogrammeerd kan worden.
Dit erg kleine board van slechts 34 bij 18 mm biedt 20 in- en uitgangen. Waaronder zes analoge inputs en zes uitgangen met pulsbreedte modulatie (PWM).
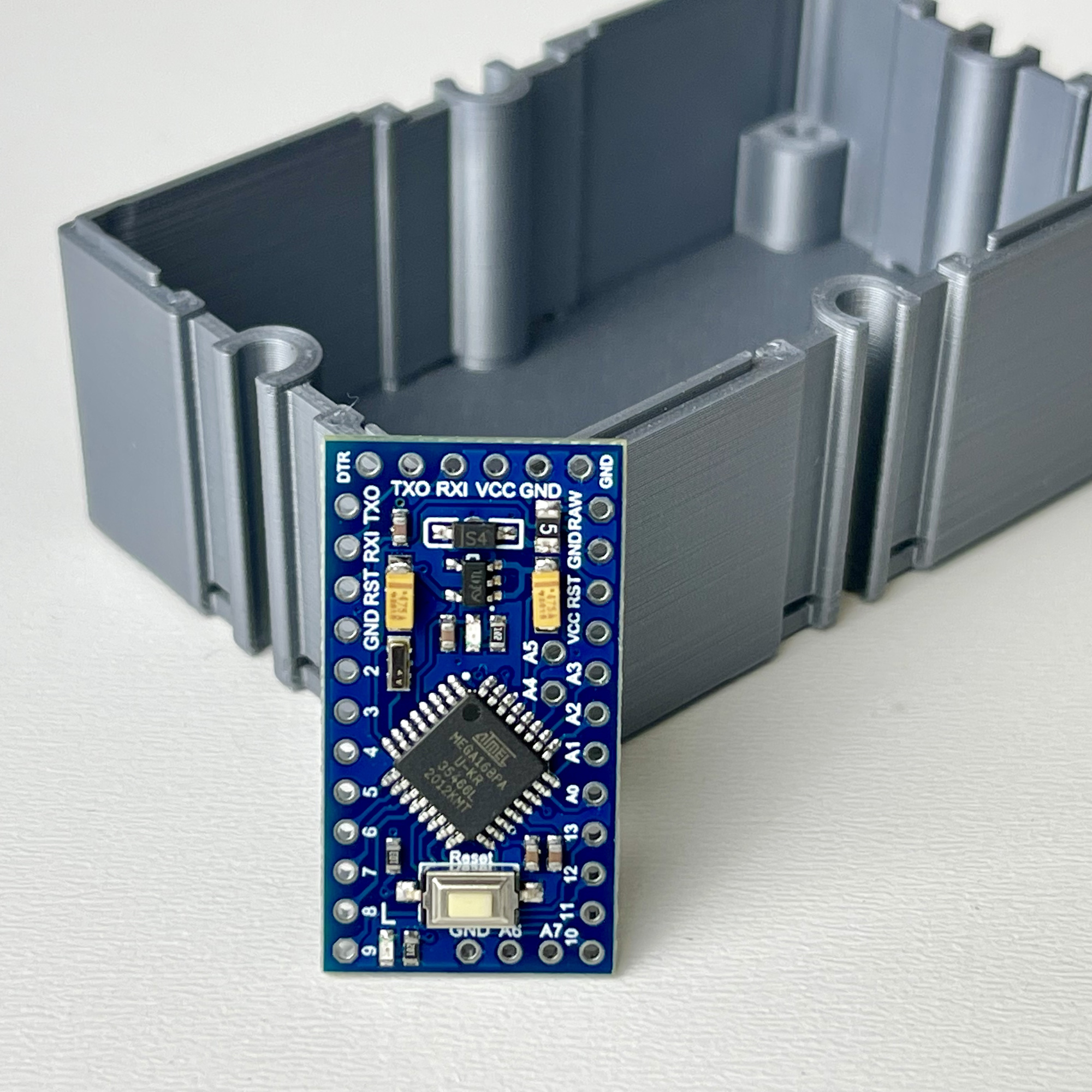
Dat de Pro Mini Atmega328P zo klein kon worden uitgevoerd, lijkt omdat alleen het strikt noodzakelijke op de printplaat is opgenomen. Er zit wél een reset-knop op. Het signaal daarvan is vreemdgenoeg zelfs ook nog dubbel is uitgevoerd op de randcontacten terwijl bruikbare in- en uitgangen zoals A4 en A5 naar het midden van de print zijn geplaatst vanwege ruimtegebrek. Het board mist ook een USB interface op de print. Hierdoor kan het board niet, zoals de meeste Arduino boards, direct op de USB-aansluiting van een computer worden aangesloten. Het uploaden van software gaat op TTL-niveau en voor het programmeren is daarom een USB naar TTL-serial adaptor nodig.
Gelukkig zijn hiervoor diverse interface-oplossingen. Soms zijn deze interfaces uitgevoerd als een snoer met losse testdraden die aan de Pro Mini Atmega328P kunnen worden aangesloten. Maar er zijn ook interfaces waarop al direct een connector kan worden gesoldeerd die op de pennen-connector van de Pro Mini kan worden geschoven. Veelal zijn ze omschakelbaar tussen 3.3 en 5 volt, zodat ook de Pro Mini op 8 MHz, die met een voedingsspanning van 3.3 volt werkt, kan worden geprogrammeerd.
Het eenvoudigst in gebruik zijn de types die tevens een DTR (Data Terminal Ready) aansluiting bieden zodat de computer het uploaden zelf kan initiëren. Als uw interface deze lijn niet heeft, dient de upload vanuit de Arduino IDE telkens met de hand te worden geforceerd door de Atmega328P op het juiste moment een reset te geven. Dit kan met de reset-knop op de print, maar deze is in veel gevallen na inbouwen niet meer bereikbaar.
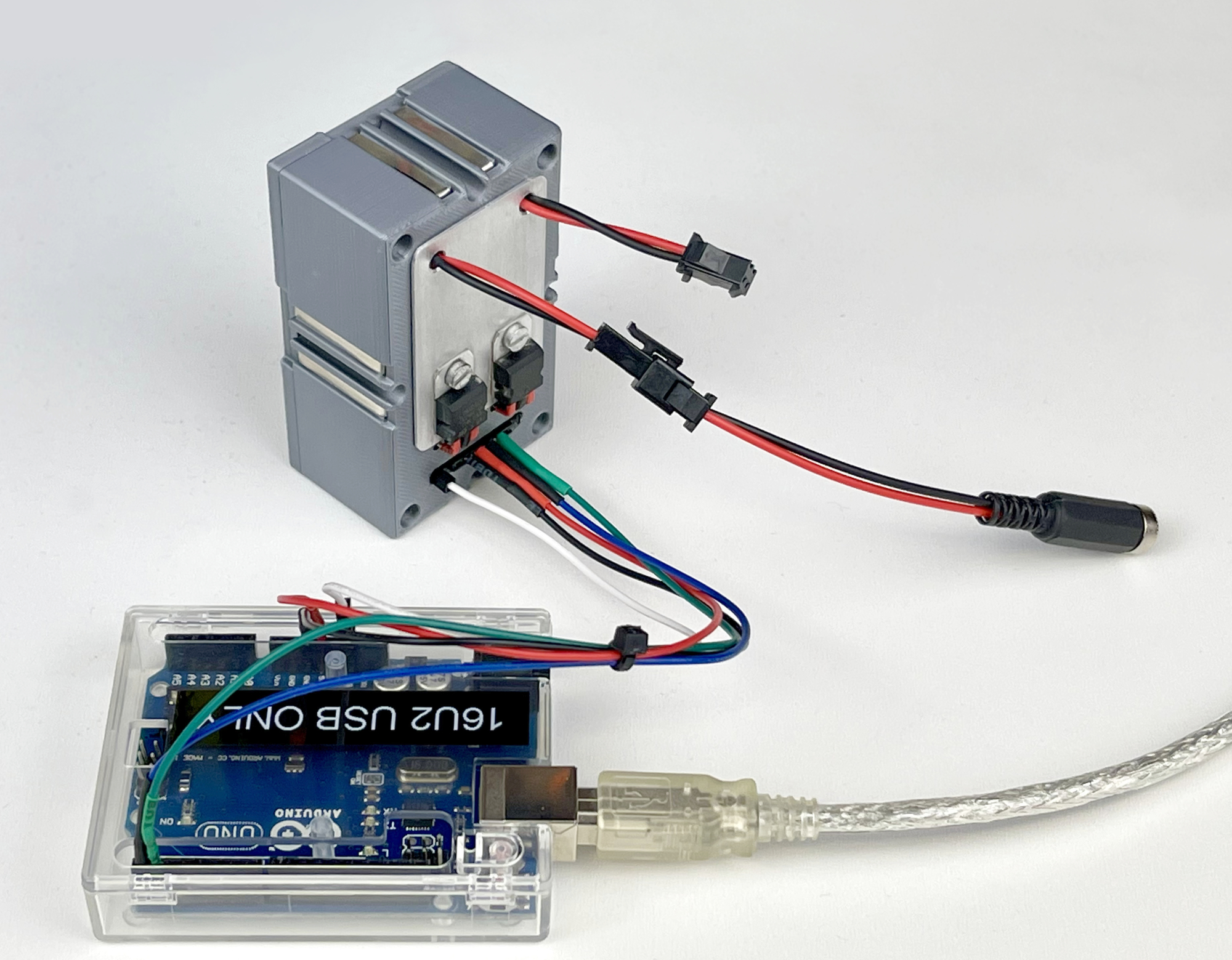
Wie op Apple apparatuur werkt, kan het best kiezen voor een interface met de CH340G chip, de interface met de FT232RL chip werd onder macOS op mijn iMac niet herkend. Windows is vergeeflijker en herkent deze chip echter zonder problemen. Uiteindelijk koos ik voor een nog elegantere oplossing waarbij ik de ATmega328 chip uit het voetje van een Uno wipte en op die wijze de prettige Mega16u2 USB-chip voor het programmeren kon gebruiken.
De programmeer-interface van de Atmega328P blijft door een opening in de bodem van de Zauberling beschikbaar. Op deze connector voerde ik voor de zekerheid ook de reset-pin naar buiten als voor het uploaden zonder DTR-control toch onverhoopt in de toekomst een handmatige reset nodig zou zijn.
Wellicht exemplarisch waren de upload-problemen waar ik bij één van de Pro Mini’s tegenaan liep. Met géen van de TTL-interfaces lukte het uploaden. Het upload-proces werd simpelweg niet gestart, ondanks de manuele reset op het juiste moment terwijl de microcontroller zélf goed leek te functioneren en hij zijn blink-Sketch (die vanuit de fabriek achterblijft na controle) bleef afdraaien. De soldeerbout was al warm aan het worden voor demontage toen ik er gelukkig nog op tijd achterkwam dat het wél werkte als ik hem instelde als Atmega168 (5V, 16MHz) in plaats van Atmega328P (5V, 16MHz). Het enige verschil lijkt dat de gebruikte uploadsnelheid van de Arduino IDE hierbij van 57600 naar 19200 wordt verlaagd waardoor de Sketch alsnog succesvol kon worden geladen. Houd dit in gedachten als u tegen een weerbarstige Atmega328P aanloopt dus!
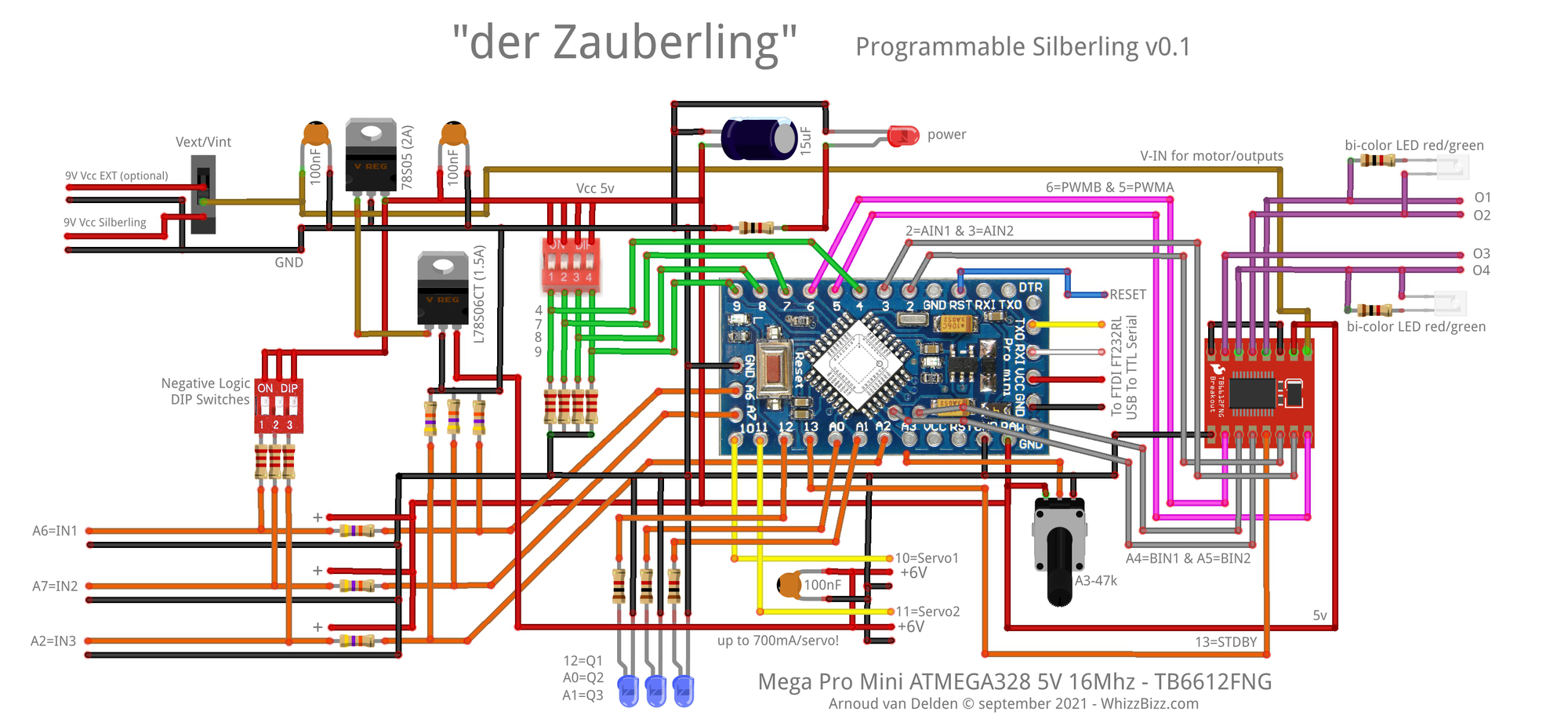
Zoals in het aansluitschema van de Zauberling is te zien, worden alle in-/uitgangen van de Atmega328P voor de Zauberling gebruikt! Voor de ingangen is de schakelanalogie van de ftDuino en fischertechniks eigen TXT controller gevolgd waarbij de sensoren aan de ingangen naar nul (massa/GND) geschakeld worden. Dit is praktischer dan bij de E-Tec module, waar de sensoren aan +9 volt hangen waardoor actieve sensoren met een eigen uitgangsspanning (doorgaans 5 volt) door het ontbreken van een gemeenschappelijke massa niet op de ingangen kunnen worden gebruikt.
De ingangen zijn uitgerust met een spanningsdeler die beschermt tot ingangsspanningen tot 10 volt en het mogelijk maakt (bij een externe ingangsspanning van 9 volt) de uitgangen als digitaal óf analoog signaal op de ingangen te gebruiken. Hierdoor wordt het combineren met de traditionele Silberlingen mogelijk.
Door middel van DIP-schuifschakelaars kan per ingang een voorspanning worden opgedrukt voor passieve sensoren zoals drukknoppen, reed-schakelaars, foto-weerstanden of -transistoren, NTC-weerstanden enz. Deze sensoren verlagen dan de spanning op de betreffende ingang, als hun weerstand door veranderingen in de omgeving kleiner wordt. De Zauberling kan dus zometeen zowel met ‘positieve logica’ als met ‘negatieve logica’ overweg.
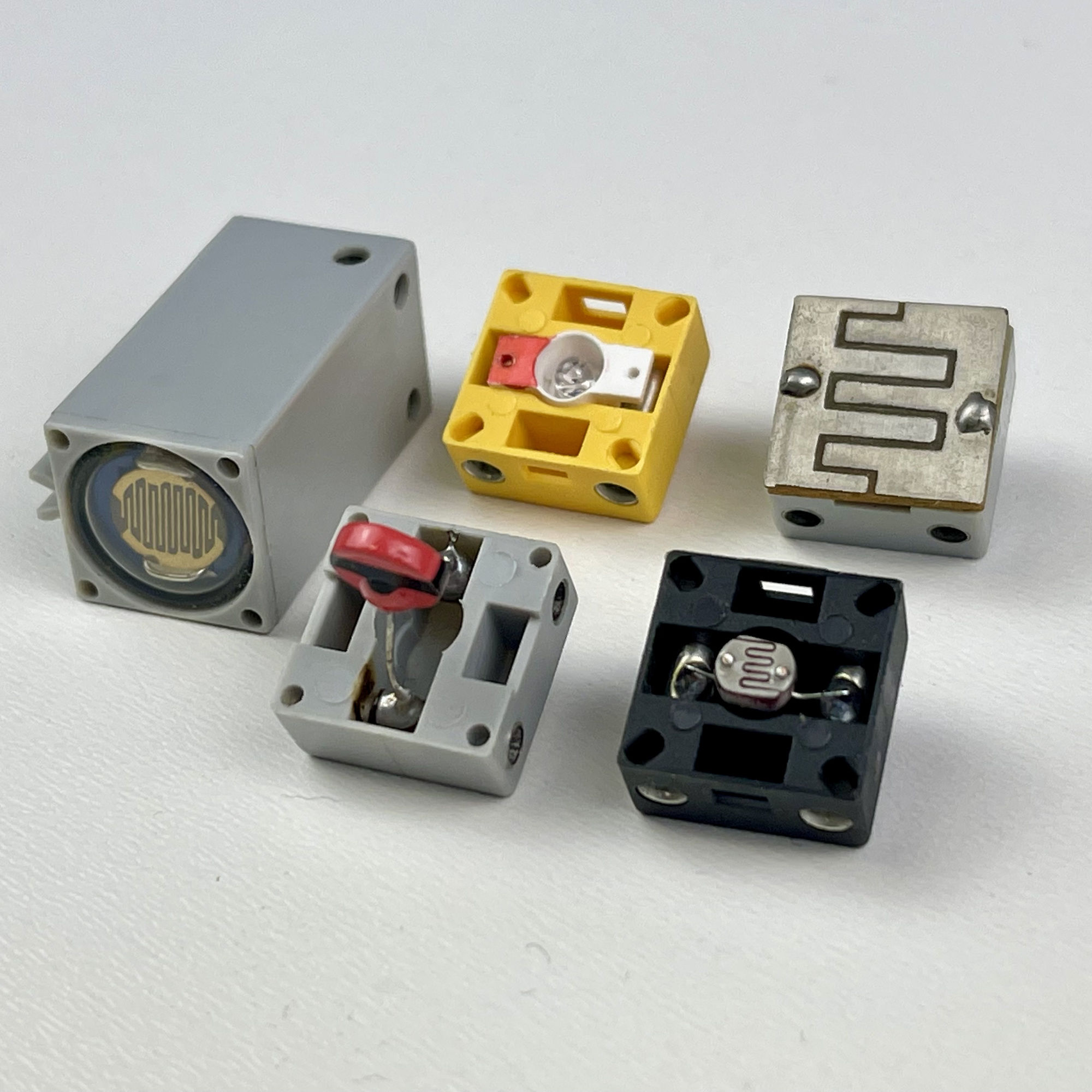
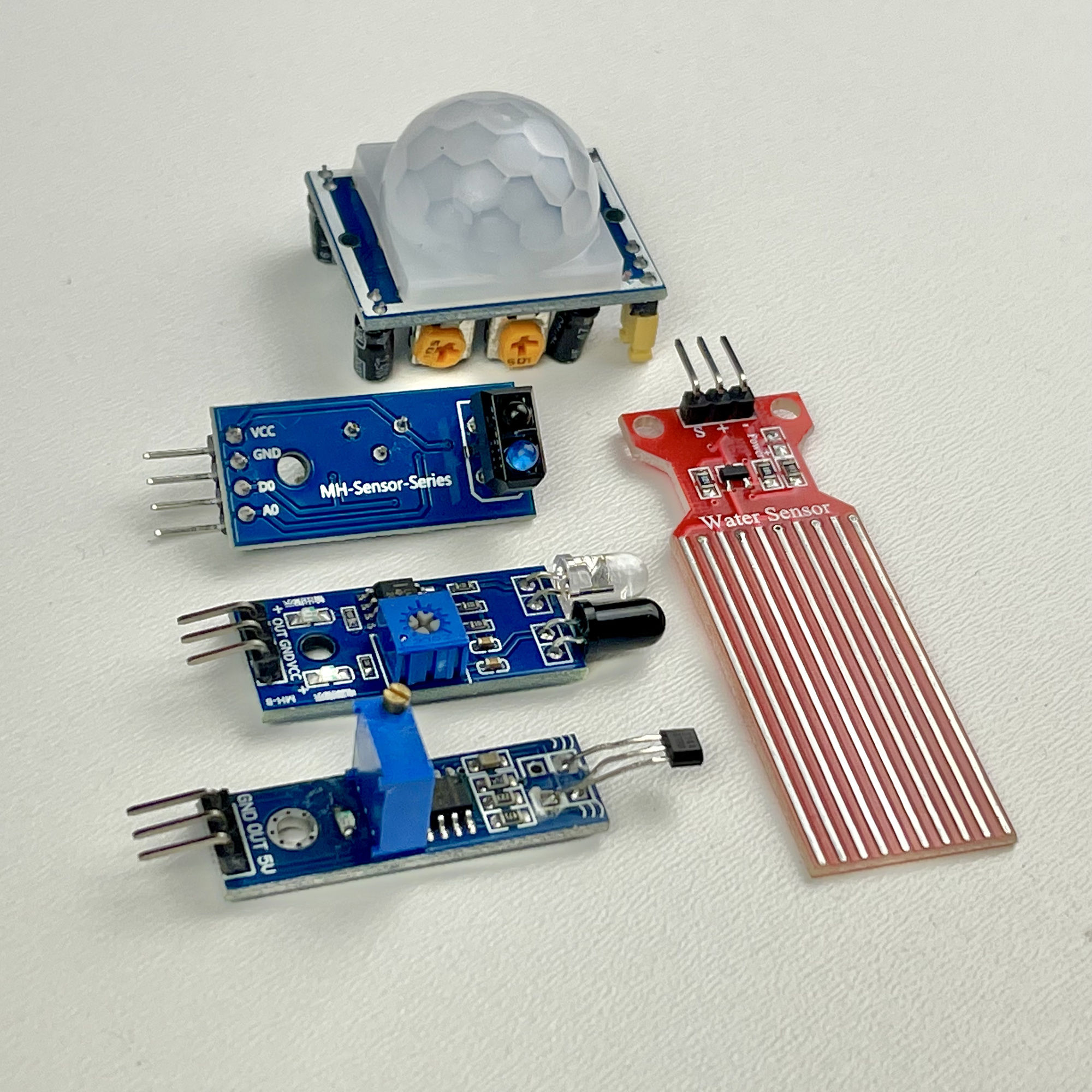
Enkele 'passieve' en 'active' (gevoede) sensoren
De interpretatie en verwerking van de gemeten ingangsspanningen kunnen in software worden opgelost. Waardoor de ingangen qua hardware betrekkelijk eenvoudig konden worden gehouden. De maximale ingangsspanning van de (optionele) externe voeding heb ik vooralsnog op 9 volt gesteld. Mocht in de toekomst blijken dat een externe spanning van 12 volt (of nog meer) zinvol is, dan is het wellicht verstandig bij een volgende versie de ingangen met 5.1 volt zeners te beschermen.
Sommige klassieke Silberlingen hebben een signaallampje waarmee de status van de uitgang kan worden afgelezen. Wat er digitaal precies op de ingangen gebeurt valt hierop echter niet direct af te lezen. De Zauberling heeft echter ook per ingang feedback door middel van een LED. Hierdoor is er op elk moment duidelijkheid over de huidige status van de drie ingangen.
Voor het aansluiten van actieve sensoren (zoals hall-effect, IR obstacle, PIR-detector, etc), die vaak als kleine modules zijn uitgevoerd, is de benodigde 5 volt voedingsspanning op een driepolige connector meegevoerd. Daarnaast zijn op het prototype ook nog de bekende fischertechnik stekkers te gebruiken voor de aansluitingen op de ingangen.
Hoe de detectiedrempels van sensoren op de ingangen van de Zauberling ‘zelf-lerend’ kunnen zijn, waarom er geen ontstoring voor schakelruis op de ingangen nodig is of welke programma’s worden uitgevoerd is verder geheel in software geregeld. Meer hierover in deel 2 van dit artikel.
Als uitgangen worden de dubbele outputs van een TB6612FNG motor-driver met PWM sturing gebruikt. Elke uitgang van deze kleine module kan tot 2 Ampère leveren. Ik heb deze driver modules al in diverse projecten toegepast en ze behoeven in de praktijk geen eigen koelelement.
Deze module eist weliswaar met zeven stuurlijnen (waarvan er twee PWM moeten zijn) relatief veel van de 20 in-/outputs van de Atmega328P op. En als de motoruitgang op O3-O4 altijd motoruitgang O1-O2 geïnverteerd volgt, zouden we hierop aansturende lijnen kunnen besparen. Maar zoals nu geconfigureerd behouden we vanuit de software nog de volledige controle over twee onafhankelijke motor-uitgangen. Hoewel dat op dit moment (bijvoorbeeld in het ‘Basisprogramma’) nog niet nodig is, biedt dit vooralsnog de mogelijkheden de twee motor-uitgangen in de toekomst als vier separate uitgangen te gebruiken.
Zoals in het, met Fritzing getekende, schema zichtbaar is zijn tevens aansluitingen voor twee servo’s voorzien. Op de connectoren wordt hiervoor een eigen voedingsspanning van 6 volt geboden.
Voor de programmakeuze worden, met als op bijvoorbeeld de E-Tec module, DIP- schuifschakelaars uitgelezen. Het serieel inlezen van een (in principe onbeperkt) aantal parallele keuze-schakelaars kost minimaal vier datalijnen en een of meerdere 74HC165 8-bit schuifregisters.
De Zauberling heeft voor de programmakeuze een DIP-schuifschakelaar met vier schuifschakelaars waarmee 16 verschillende programma-keuzen kunnen worden gemaakt. Voor het inlezen van deze settings werden daarom simpelweg vier parallele datalijnen gebruikt omdat het serieel inlezen van dergelijke schuifschakelaars dus pas lonend wordt bij bredere DIP-schuifschakelaars met meer keuzemogelijkheden (schuifschakelaars).
De gelijkrichter bouwsteen h4 GB (nr. 39570) zou, volgens de originele specificaties, een maximale stroom van 800 mA kunnen leveren. Behalve dat deze maximale stroom bepaald wordt door de gebruikte brugcel is deze met name begrensd door de gebruikte fischertechnik trafo. De originele fischertechnik trafo’s 812 en 814 leveren respectievelijk 5 VA en 7 VA (Watt). Bij het gespecificeerde wisselspanningsvoltage van 6,8 volt zou dat een maximale stroomsterkte van respectievelijk (5/220=) 735mA en (7/220=) ~1A betekenen hoewel fischertechnik, waarschijnlijk veiligheidshalve, bij de wisselstroomuitgang slechts 0,5 Ampère specificeert.
In de praktijk zouden meerdere slechts digitaal gebruikte (< 800 mA) Zauberlingen uit de traditionele stroomvoorziening van de Silberlingen met de gelijkrichter bouwsteen h4 GB (nr. 39570) moeten kunnen worden gevoed. Volgens de specificaties van fischertechnik zelf, geeft de trafo een wisselspanning van 6,8 volt af, die leidt tot een gelijkgerichtte spanning van ~9 volt. De fischertechnik trafo’s stammen echter uit het begin van de tweede helft van de 20e eeuw, toen de netspanning (in Nederland) nog 220 volt bedroeg. Inmiddels is het streven 230 volt, hoewel in de praktijk hier thuis (bij diverse steekproeven) de werkelijke waarde dikwijls tussen deze twee uitersten blijkt te liggen. Dit zou vanzelfsprekend regionaal of landelijk kunnen verschillen.
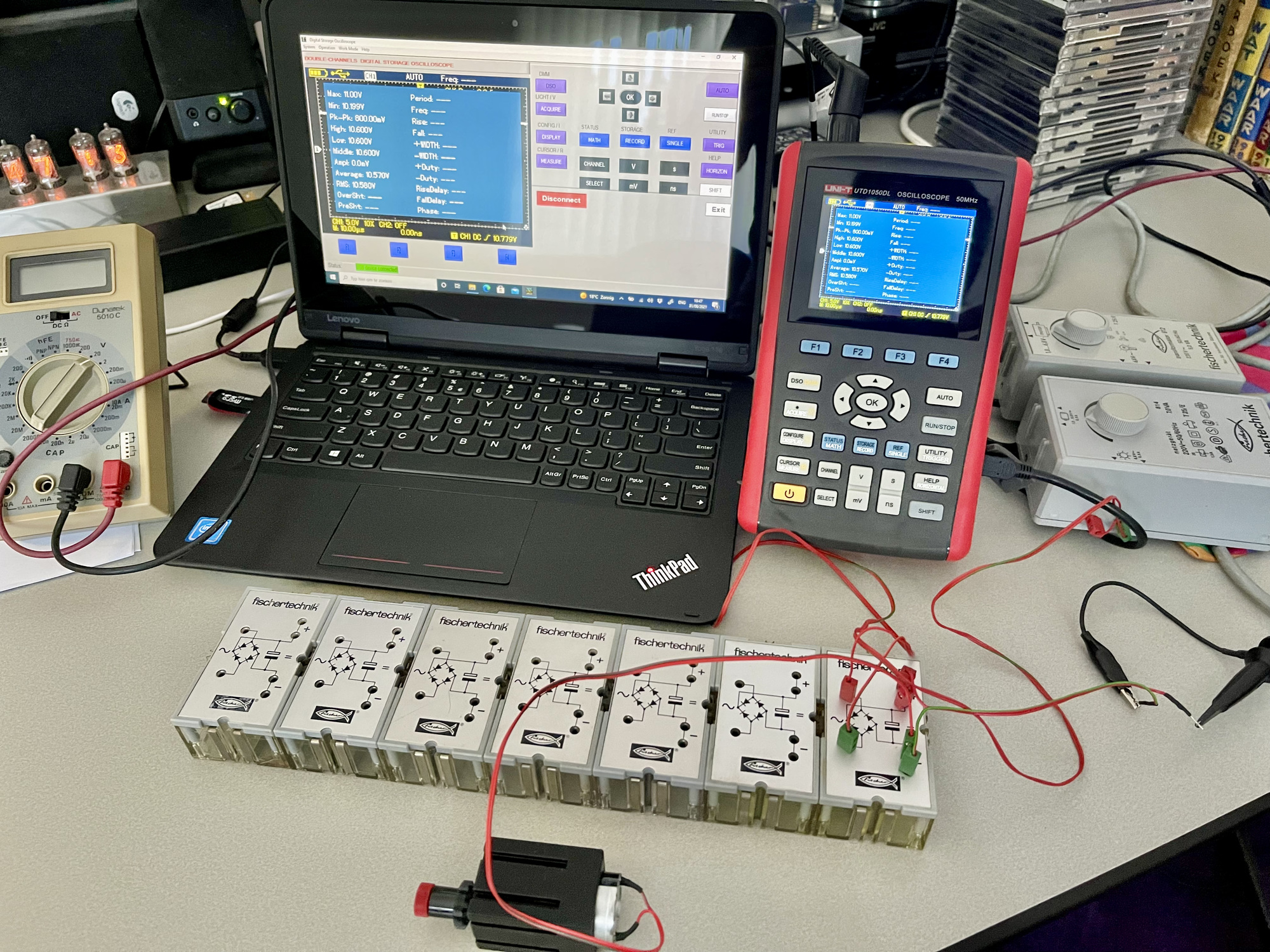

Op geleide van ervaringen en (recente) publicaties van fischertechnik-collega’s, besloot ik de uitgangsspanning ook maar eens op de oscilloscoop te bekijken. Bevestigd werd dat de trafo-uitgangen van de door mij getestte 812 en 814 trafo’s (onbelast) een wisselspanning met toppen tot wel 12,8 volt te zien gaven. De RMS-waarde (energie inhoud) lag gelukkig met zo’n 8,7 volt dichter bij de gespecificeerde waarde van 6,8 volt. De h4 GB gelijkrichtermodules maken hier (onbelast) gemiddeld een gelijkstroom van zo’n 11 volt van welke bij belasting (bijvoorbeeld met een kleine fischertechik motor) terugloopt tot zo’n 10 volt.
Het is duidelijk dat de mogelijkheid voor het aansluiten van een externe voeding van 9 volt, heel prettig is. Vooral als er meerdere motoren of andere verbruikers, zoals magneetventielen voor een pneumatisch model, moeten worden aangestuurd. Idealiter zou de module dus zijn eigen 5 volt spanningsregeling moeten krijgen voor de microcontroller en het voeden van actieve sensoren en de servo’s. Maar hoeveel warmte hierbij geproduceerd zou worden en of bijvoorbeeld voor de servo’s (die belast wel tot 650 mA kunnen trekken) een eigen 6 volt voorziening nodig was, was lastig te bepalen. Daarom bouwde ik de schakeling eerst maar eens experimenteel op.
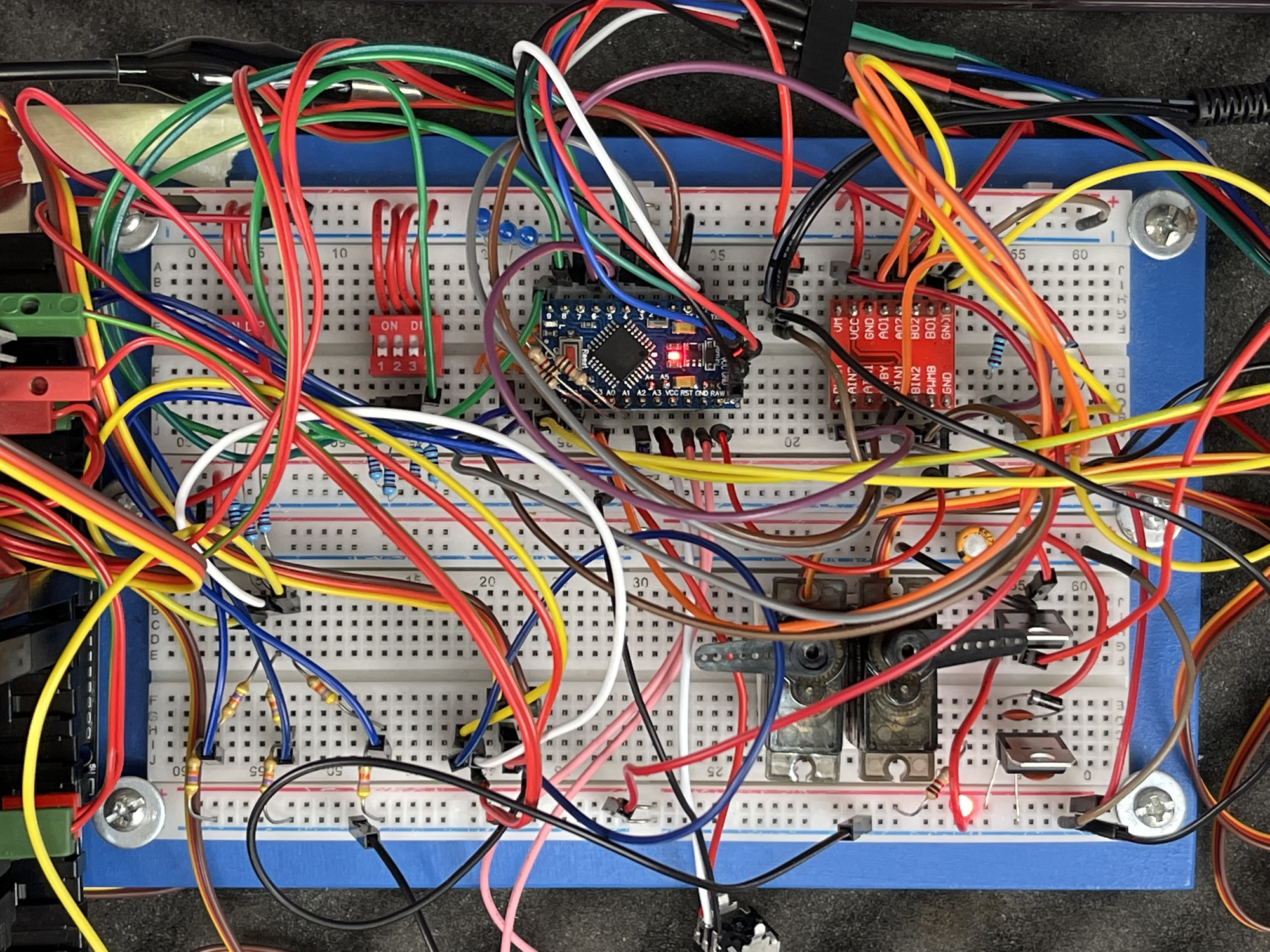
Uit de experimenten kwam naar voren dat de basisschakeling van de Zauberling in rust slechts 66 mA trekt. Bij het testen van de motor-uitgangen werden pieken van 400 mA gemeten. Een enkele 7805 spanningsregulator kan maximaal 1 Ampère leveren en werd hierbij al direct behoorlijk heet. Ik verving hem alvast door een 7805CV die maximaal 1,5 A kan leveren.
Toen getest werd met de twee servo’s liep de warmteontwikkeling verder op. Eén bewegende en mild belaste MG90S mini servo trok in de testopstelling wel tot 425mA. Volgens de specificaties kan dit gemakkelijk oplopen tot wel 650 mA bij een zwaardere belasting. Dit betekent dat het gebruik van twee servo’s tegelijk weliswaar kortstondig mogelijk is, maar dat het verstandiger is de servo’s hun eigen 87S06 spanningsregulator voor 6 volt te geven en voor de 5 volt voorziening misschien zelfs een nog zwaardere 87S05 (maximaal 2 A) te gebruiken. Niet zozeer vanwege de stroomsterkte, maar omdat enig overdimensioneren nooit kwaad kan. Bovendien leerde deze test dat het voor de zekerheid zinvol is beide spanningsregulators op een koelelement te monteren.

Uiteindelijk kwam ik er op uit de modules doorlusbaar te maken en de spanningsregulators een klein koelelement op de achterzijde van de Silberling te geven in de vorm van een stukje aluminiumplaat. Voor dit prototype, versie 0.1, voldoet dit prima. Voor een volgende versie kan misschien gekeken worden naar een separate voedingsprint onderin de behuizing waarop ook direct de aansluitingen voor de externe voeding zijn ondergebracht. Dit zou het inbouwen vergemakkelijken. Bovendien kunnen dan de connectoren voor het eventueel doorlussen van de voedingsspanning hierop ook direct een plaatsje vinden zodat hiervoor geen, soms ongebruikte, losse snoertjes met stekkers nodig zijn.
Het in elkaar bouwen en testen van het prototype was een precies klusje maar het gaf geen noemenswaardige tegenslagen. De draad-spaghetti van de experimentele test-opstelling was nu een Zauberling geworden. Bij het dichtschroeven kreeg ik het gevoel alsof ik de geest opsloot in de lamp... 🙂
De Zauberling werkte vrijwel direct zoals hij reeds op het breadboard had laten zien. Het kleine koelelement achterop voldoet hierbij uitstekend. Zelfs bij volledige belasting werd het niet meer dan handwarm.

Misschien valt het te overwegen in de toekomst de opbouw van de Zauberling meer in smd-technologie te doen. Zowel de microprocessor als de motordriver zijn immers reeds in smd technologie uitgevoerd. Voor de TB6612FNG valt dit zeker te overwegen, de door mij gebruikte complete module heeft nauwelijks aanvullende componenten. Aan de andere kant: de losse chips zijn in de praktijk waarschijnlijk net zo duur als de complete modules. Deze hebben bovendien het voordeel dat ze ‘piggy-back’ óp de hoofdprint kunnen worden gemonteerd waardoor het ontwerp vereenvoudigt en de (verticale) ruimte economischer wordt benut.
De servo-uitgangen heb ik tot dusverre nog niet nodig gehad. Deze lijken wel degelijk nuttig, maar misschien is hiervoor in de toekomst een aparte servo-Silberling met meer handmatige instelmogelijkheden per servo te overwegen. Een andere afweging is of een volgende versie nog bussen voor de traditionele fischertechnik stekkers zou moeten hebben. Behalve dat het meevoeren van voedingsspanning voor actieve sensoren hiermee gemakkelijker is, gaan de modernere pen-connectors een stuk efficiënter met de spaarse ruimte op het front van de Zauberling om. En daarbij: In principe hoeven de vertrouwde fischertechnik stekkers alleen aan de zijde van de aangestuurde fischertechnik-eigen onderdelen in het model te zitten.
Wat in de toekomst zeker een plekje op het front gaat krijgen is een reset-knop. In de praktijk merkte ik nu al dat dit, bijvoorbeeld na het maken van programmawijzigingen met de DIP-schuifschakelaars, erg gemakkelijk kan zijn. Voor nu loste ik dit op door een micro-switch op te nemen in de bedrading vanaf de Uno die ik voor het programmeren gebruik. Het is ook mogelijk de Vext/Vint schuifknop hiervoor even naar de neutrale middenstand te bewegen en op die manier een reset te forceren.
De Zauberling heeft nu zijn (eerste) goochelstok. Maar wat is een magiër zonder zijn magische spreuken? In deel 2 van deze serie kijken we daarom naar de (eerste) software voor deze zelfbouw Silberling.