
Op de andere projectpagina's passeerden reeds diverse contactloze schakelaars de revue. Uitgangspunt was dat deze ook gebruikt kunnen worden in schakelingen die zijn opgebouwd met de klassieke fischertechnik elektronicamodules, die ook wel 'Silberlingen' worden genoemd. Intussen experimenteerde ik met de voedingsspannings- en het signaaluitgangsniveau van enkele andere sensoren zoals de IR-obstakel-, LDR-, Hall-Effect- en PIR-bewegingssensor. Het feit dat deze sensoren soms met een relatief kleine aanpassing al direct op 9 volt kunnen worden bedreven maakt ze in principe reeds geschikt voor gebruik met de microcontrollers (zoals de fischertechnik 'TXT controller') die op deze hogere voedingsspanning werken. Daarbij blijkt de uitgang vaak zelfs reeds geschikt, of eenvoudig elektronisch compatible te maken, zijn voor direct gebruikt op de vintage 'Silberlingen' voor meer conventionele elektronica experimenten.

Ik experimenteerde met een aantal sensormodules die eenvoudig en voor weinig geld online te koop te zijn en reeds reeds zijn voorzien van een verschilversterker of Schmitt-trigger die voor steile signaalflanken rond het schakelniveau zorgt. Het uitgangssignaal van deze boards kan direct zonder ontstoring gebruikt kan worden in synchrone circuits. Ook bij de hier voorgestelde toepassingen waarbij er met de klassieke 'Silberlingen' wordt gewerkt, is het ‘unprellen’ van eventuele schakelruis daarom niet nodig.
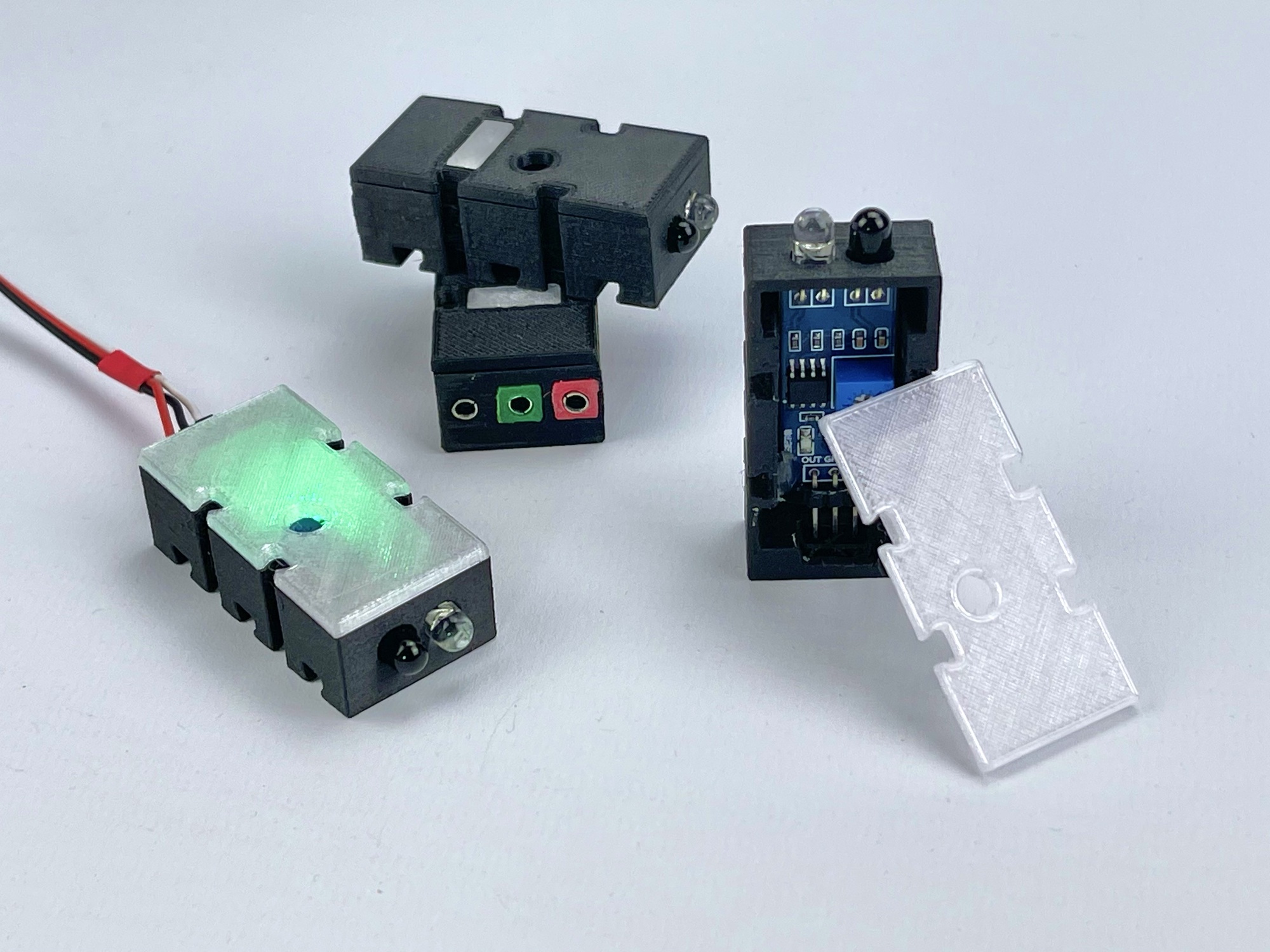
Drie van de hier besproken sensoren konden worden ondergebracht in een kleine (22,5 x 15 x 45 mm) behuizing waarvan ik verschillende versies ontwierp voor het aansluiten met een platte 3-polige (Dupont-)stekker en met bussen voor gebruik met de bekende fischertechnik stekkers. Daarnaast experimenteerde ik met verschillende dekseltypen. De gesloten deksel met een transparante diffusor dat als venster voor de detectie-LED op de het board dient, verving ik later door een transparante deksel. Als de behuizing met rood wordt geprint, lijnt dit visueel mooi aan bij de elektronicamodules uit het fischertechnik programma.
Een zeer bruikbare sensor waarmee ik al langer experimenteer, is de IR-obstakel sensor (HC-SR501). Net als de meeste andere sensorboards, verwacht ook deze in de basisuitvoering een voedingsspanning van slechts 5 volt. Op het kleine sensorboard is aan één zijde al een 3-polige ‘male’ stekker opgesoldeerd. Helaas is de pinvolgorde hiervan niet standaard. Waar bij 3-polige servosnoeren de + slim in het midden gepositioneerd is (om bij omdraaïng ompoling en beschadiging te voorkomen) is bij dit sensorboard de 0 volt (GND) in het midden gepositioneerd.
Om de sensor in het 9 volt domein van de fischertechnik modules te brengen werd in het verleden al een aantal mogelijke aanpassingen besproken. Omdat de op het board gebruikte LM393 verschilversterker in principe al een voedingsspanning tot 36 volt aan kan, vormt gebruik op 9 volt theoretisch niet eens een heel groot probleem.
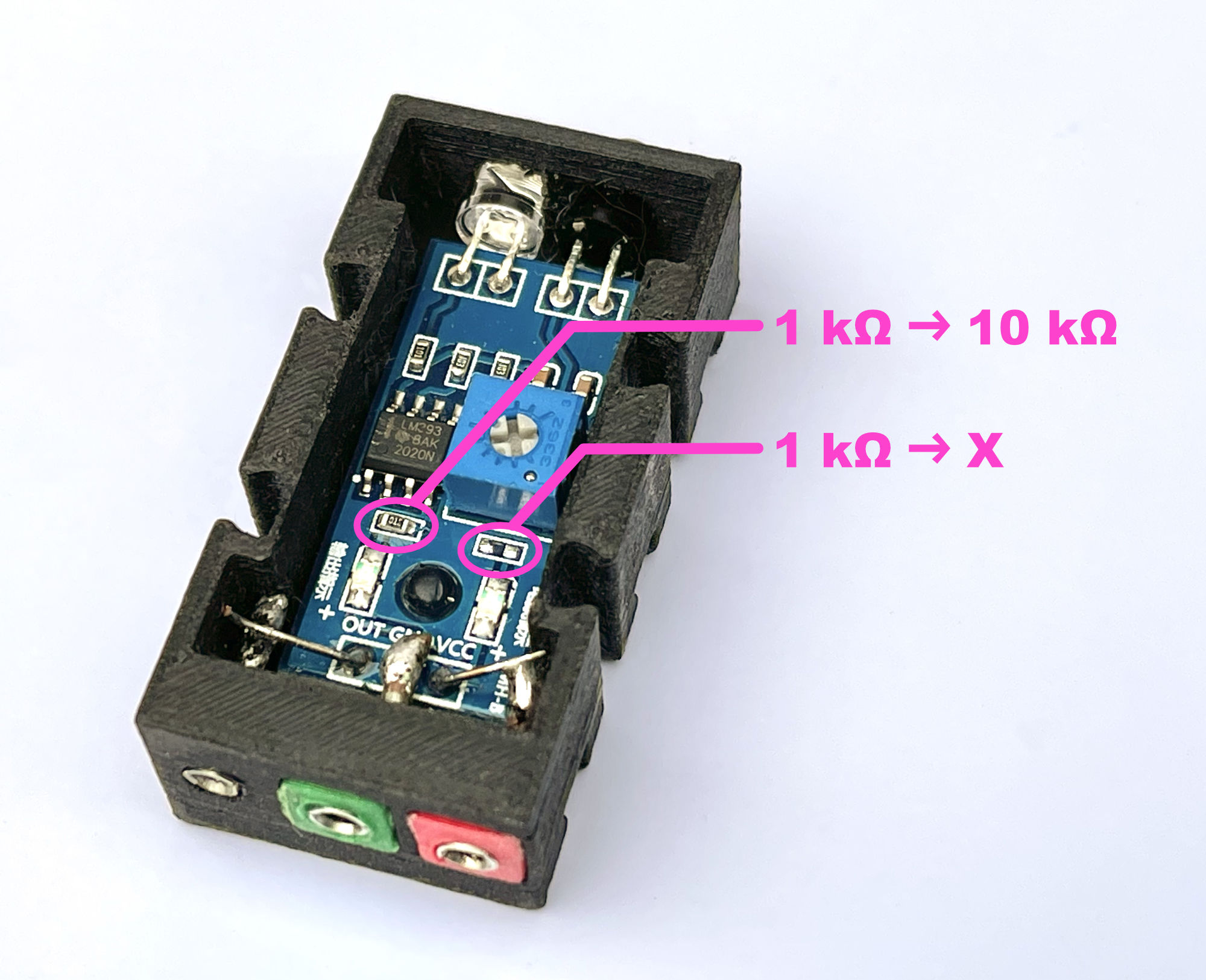
Er bevinden zich echter twee erg felle rode ‘low current’ SMD LED’s op het board die van een voorschakelweerstand van 1 kΩ zijn voorzien. Eén LED brandt zodra de voedingsspanning wordt aangesloten en de andere bij detectie. Begrijperlijkerwijs branden deze LED’s op 9 volt wel heel erg fel (en houden het naar verwachting zelfs niet lang vol). Ik heb dat opgelost door beide voorschakelweerstanden te verwijderen en de detectie-LED een nieuwe SMD voorschakelweerstand van 10 kΩ te geven. In principe volstaat minimaal zo’n 4k7Ω, maar op deze manier hebben we nog wat headroom richting de 12 volt voor toepassing op de Silberlingen. De LED’s branden namelijk ook bij zeer lage stromen al fel genoeg. Het solderen van de nieuwe weerstand met SMD footprint 0603 is een precisiewerkje, maar is ook zonder speciale hetelucht soldeerapparatuur goed te doen.
Doordat de sensor na deze modificatie uitstekend op 9 volt functioneert is deze zonder problemen met zowel de TXT controller als de 'Silberlingen' te gebruiken. De uitgang kan direct worden aangesloten op de ingangen van de'Silberlingen' omdat de gebruikte LM393 met zijn ‘open collector’ uitgang geen enkele moeite heeft met de negatieve logica en conventionele elektronica van deze klassieke elektronicamodules. De sensoruitgang kan dus ook direct gebruikt worden in schakelingen die zijn opgebouwd met de verscheidene 'Silberlingen' modules.
Het uitgangssignaal bedraagt bij voeding met 9 volt nagenoeg de voedingsspanning. Dit daalt tot nul volt bij detectie van een object binnen de, via een gaatje in het deksel in te stellen, detectieafstand. Het schakelgedrag sluit hiermede dus aan bij de negatieve logica van de 'Silberlingen'.
Net als bij de bovenbeschreven sensor, vinden we hier de LM393 terug als verschilversterker. De schakelpuls van het uitgangssignaal is daardoor mooi steil en kan door het ontbreken van schakelruis ook direct als digitale klokpuls worden gebruikt. Zoals reeds werd aangestipt is dit een erg prettige eigenschap van deze contactloze schakelaars.
De Hall-Effect sensor is opgebouwd rond de 3144 Hall sensor die in principe een voedingsspanning tussen 4.5 en 24 volt aan kan. Hierdoor kan hij, net als bovengenoemde IR-obstakelsensor zonder problemen op 9 volt gebruikt worden.
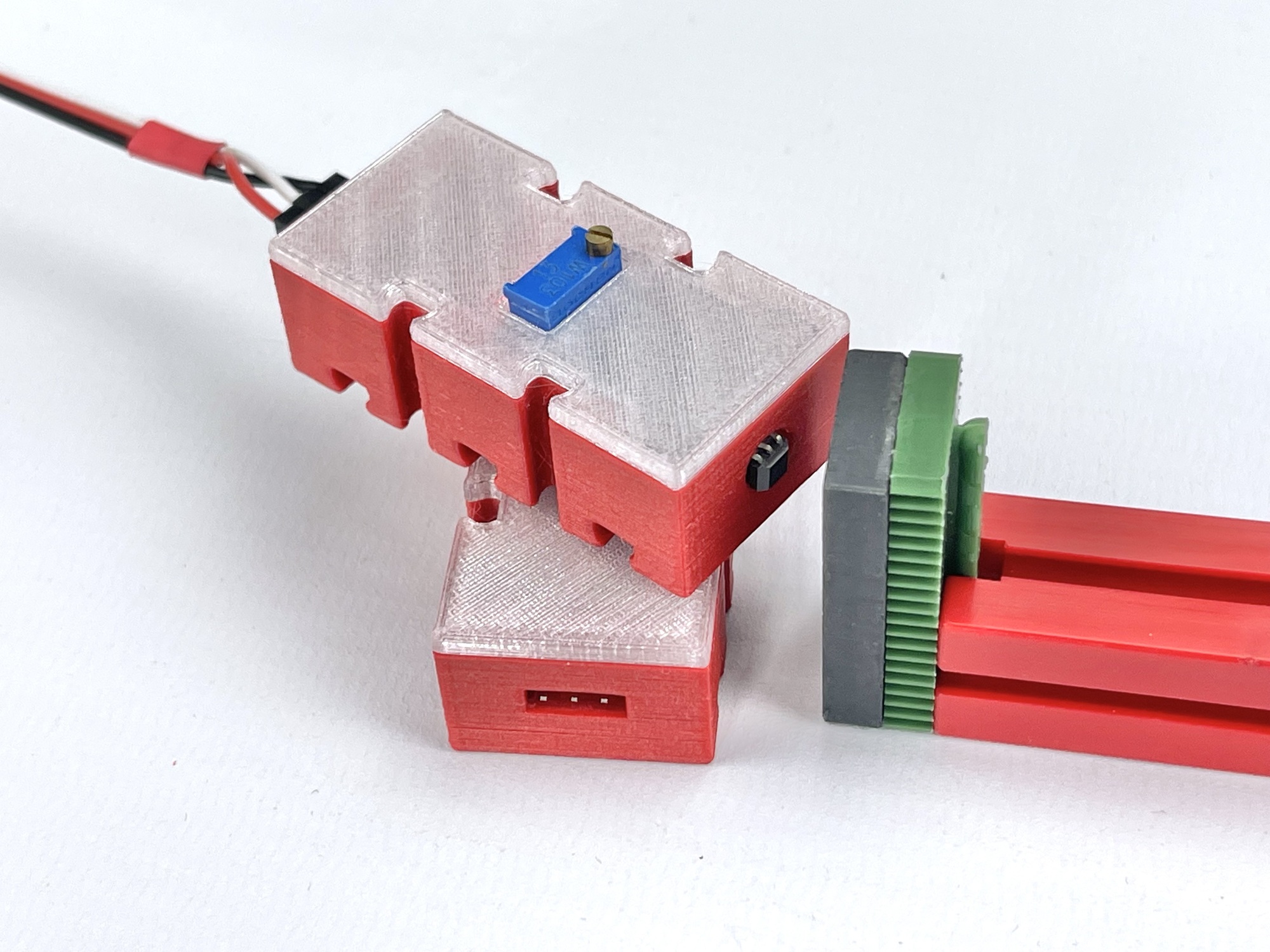
Het sensorboard heeft slechts een (groene) LED die oplicht bij detectie dus er hoeft geen permanent brandende LED onklaar te worden gemaakt zoals bij de IR-obstakelsensor. De voorschakelweerstand van 4k7Ω van de detectie-LED hoeft bij gebruik op 9 volt niet te worden gewisseld. Deze sensor behoeft dus eigenlijk helemaal niet gemodificeerd te worden en kan bovendien, met slechts minimale wijzigingen aan de behuizing, in het voor de IR-obstakelsensor ontworpen en 3D-geprinte kastje worden ondergebracht. Alleen de deksel wijkt af, omdat voor het instellen van deze sensor een relatief hoge staande 10-slagen potmeter is gemonteerd.
Bij het aansluiten met een 3-polig servo-snoer moet er echter wel op gelet worden dat de signaaloutput op middelste pin naar buiten komt. Het uitgangssignaal bedraagt bij voeding met 9 volt zo’n 7,4 volt in rust. Dit daalt tot nul volt bij detectie van een magnetisch veld, bijvoorbeeld als een magneet langs de sensor wordt bewogen. De sensor heeft hiermede dus, net als alle andere hier besproken 9 volt sensoren, een geïnverteerd schakelgedrag dat aansluit bij de negatieve logica van de 'Silberlingen'. De sensoruitgang van de sensor kan direct gebruikt worden als ingangssignaal voor deze klassieke elektronicamodules.
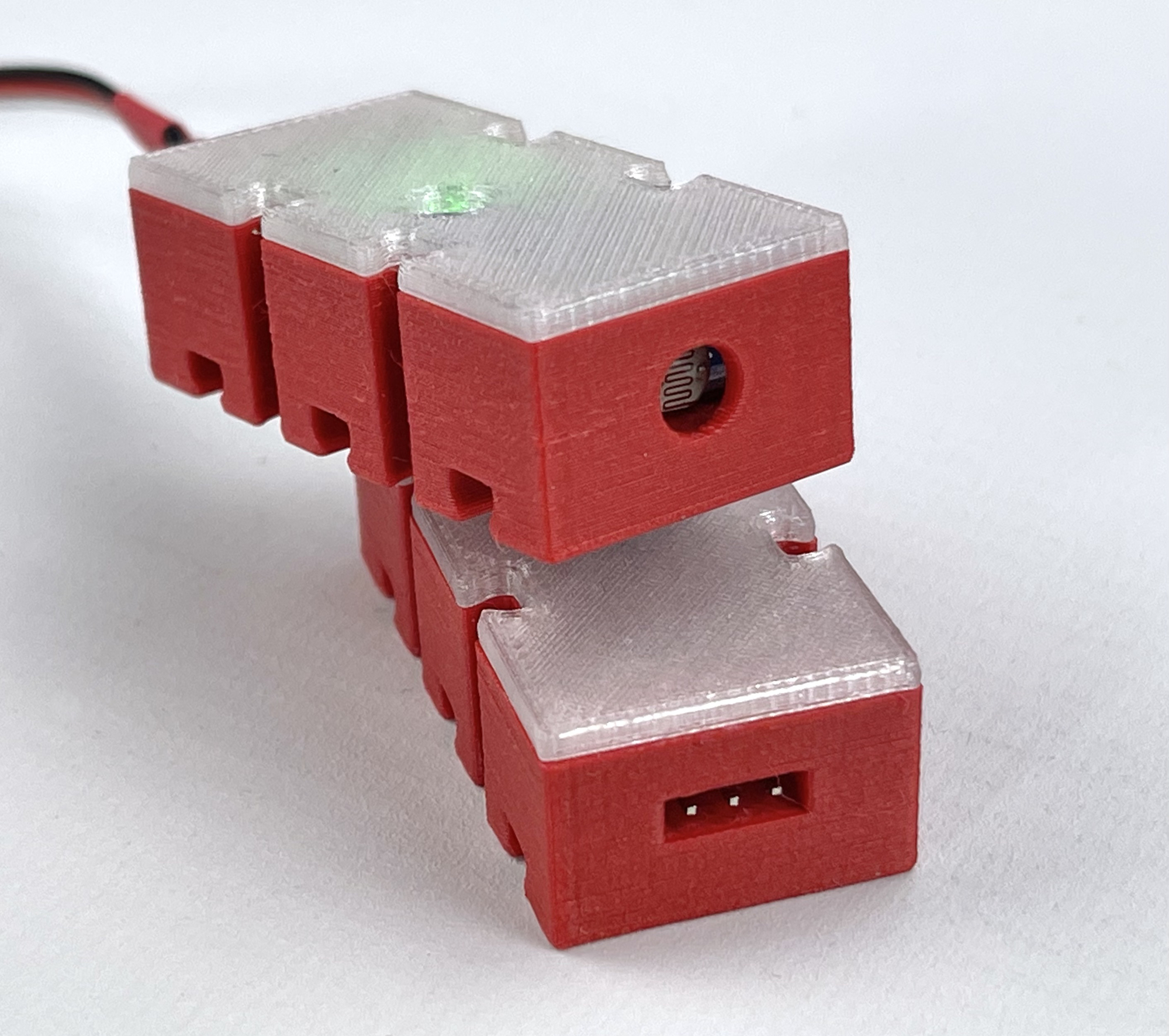
Ook het board met een lichtgevoelige weerstand is uitgerust met een LM393 verschilversterker, en past zonder problemen in dezelfde behuizing als de andere boven beschreven sensorboards.
Deze sensor dient, voordat hij op 9 volt kan worden gebruikt, dezelfde modificaties ondergaan in verband met de LEDs. De voorschakelweerstand van de permanent brandende LED kan simpelweg compleet worden verwijderd en de voorschakelweerstand van 1 kΩ dient absoluut te worden gewisseld met een nieuwe SMD voorschakelweerstand van 10 kΩ. Niet alleen om de LED voor doorbranden te behoeden, maar in dit geval tevens om de open-collector uitgang van de verschilversterker beter aan te passen aan de ingangen van de 'Silberlingen'.
Bij het aansluiten met een 3-polig servo-snoer moet er bij deze sensor wel op gelet worden dat de nul/GND op de middelste pin naar buiten komt. Het uitgangssignaal bedraagt bij voeding met 9 volt nagenoeg de voedingsspanning zolang er voldoende licht op de sensor valt. Dit signaalniveau daalt tot nul volt tijdens verduistering. De sensor heeft hiermede dus, net als alle andere hier besproken 9 volt sensoren, (voor de meeste toepassingen) een geïnverteerd schakelgedrag dat aansluit bij de negatieve logica van de 'Silberlingen'. Ook voor deze sensor is geen voorgeschakelde verschilversterker nodig zodat hij direct te gebruiken is als ingangssignaal voor de diverse klassieke 'Silberlingen'.
Tenslotte bekijken we de HC-SR501 Infrared PIR Motion Sensor. Een passieve infraroodsensor (PIR-sensor) is een elektronische sensor die infrarood (IR) licht meet dat wordt uitgestraald door objecten in het gezichtsveld van de sensor. De sensor kan op deze manier beweging detecteren.
Een voor de hand liggende toepassing is om bijvoorbeeld op een tentoonstelling een model automatisch in werking te laten treden zodra een potentiële toeschouwer nadert. De module heeft zelf al een instelbare timer waarmee de tijdsduur van de werking in zo’n geval kan worden ingesteld. Hier hoeft dus geen waardevolle mono-flop functie, of wachtlus of teller ingeval van een softwarematige regeling, aan te worden besteed.
De afmetingen van deze sensor wijken af van de bovengenoemde sensoren waardoor het nodig was er een eigen behuizing voor te ontwikkelen. Deze is in beginsel vrij eenvoudig gehouden waardoor de aansluitgegevens en instelmogelijkheden op een kaartje in de open achterzijde kon worden opgenomen.
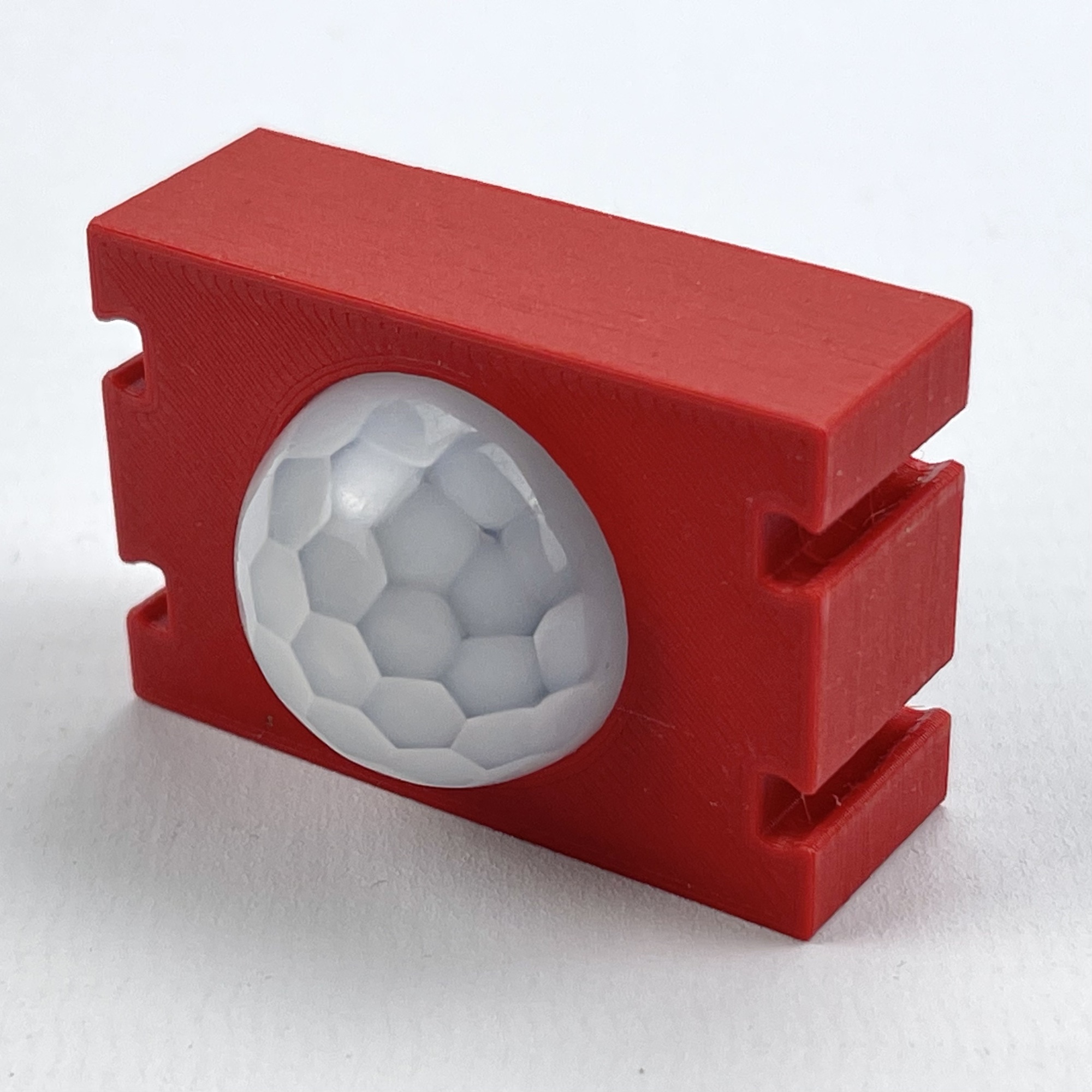
De gevoeligheid (detectieafstand) en tijd dat het uitgangssignaal actief blijft na detectie zijn via openingen in de zijkant van de behuizing instelbaar met een kleine schroevendraaier. Door het verplaatsen van een jumper kan worden gekozen tussen éen detectiepuls bij herhaald (binnen de time-out) detecteren van een beweging, of losse pulsmeldingen. Voor de meeste toepassingen lijkt me de ‘retrigger’-modus de meest voor de hand liggende, dus ik liet de jumper in eerste instantie op zijn plek.
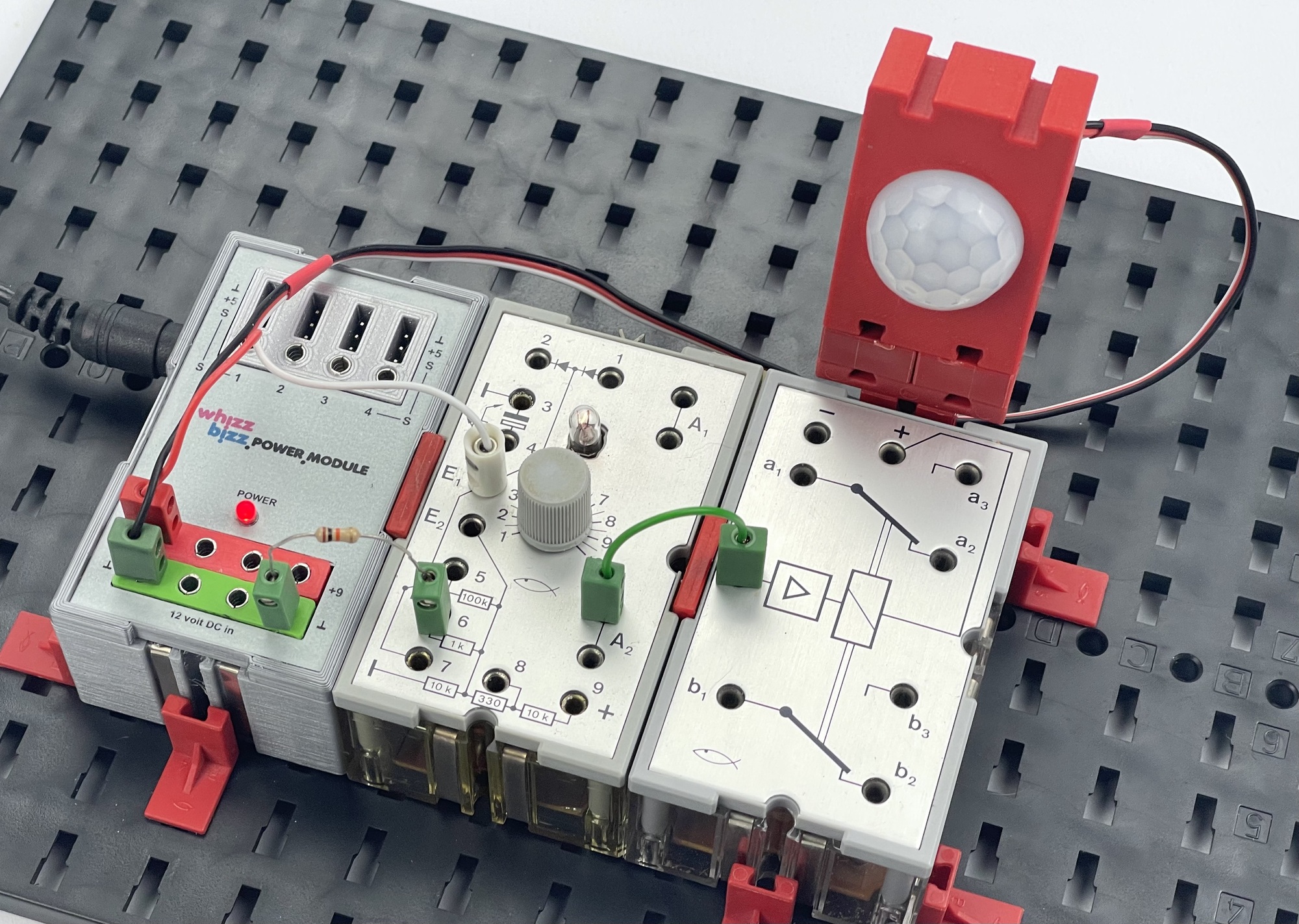
Deze sensor hoeft niet gemodificeerd te worden om op 9 volt te werken. De spanningsregulator kan een voedingsspanning tot 20 volt aan. Intern werkt hij echter op slechts 3.3 volt en dit is hierdoor ook het spanningsniveau van het uitgangssignaal. Geschakeld via de fischertechnik Grundbouwstein met verlaagde vergelijkingsspanning (weerstand van 10kΩ tussen bus 6 en massa) op E2 is ook deze sensor, net als alle andere besproken contactloze schakelaar in deze serie, uitstekend te gebruiken in met 'Silberlingen' opgebouwde schakelingen (zie foto).
Ik bouwde van de IR-obstakelsensor ook enkele exemplaren die met de traditionele fischertechnik snoeren met 2,5 mm stekkers kunnen worden aangesloten. Van de andere sensoren bouwde ik simpelweg exemplaren die aan de sensorzijde met een standaard servosnoer met 3-polige platte stekker kunnen worden aangesloten. De aansluitvolgorde van de drie pinnen in deze stekker verschilt echter per sensor. Gelukkig zijn de aders in de de stekker van een kant en klare servosnoer eenvoudig te herschikken. Op de vorige projectpagina werden de mogelijkheden hiertoe reeds besproken.
Ik experimenteerde met een dichte deksel met transparante diffusor en koos uiteindelijk voor een transparante deksel om het licht van de detectie LED zichtbaar te maken. De enige sensor waarbij dit storend zou kunnen werken is wellicht de LDR-module. Maar omdat de gevoeligheid van deze module instelbaar is, was het in de praktijk nog niet nodig om aan de binnenzijde van de deksel of achter de LDR een lichtbarrière op te werpen om invallend stoorlicht via de deksel te voorkomen.
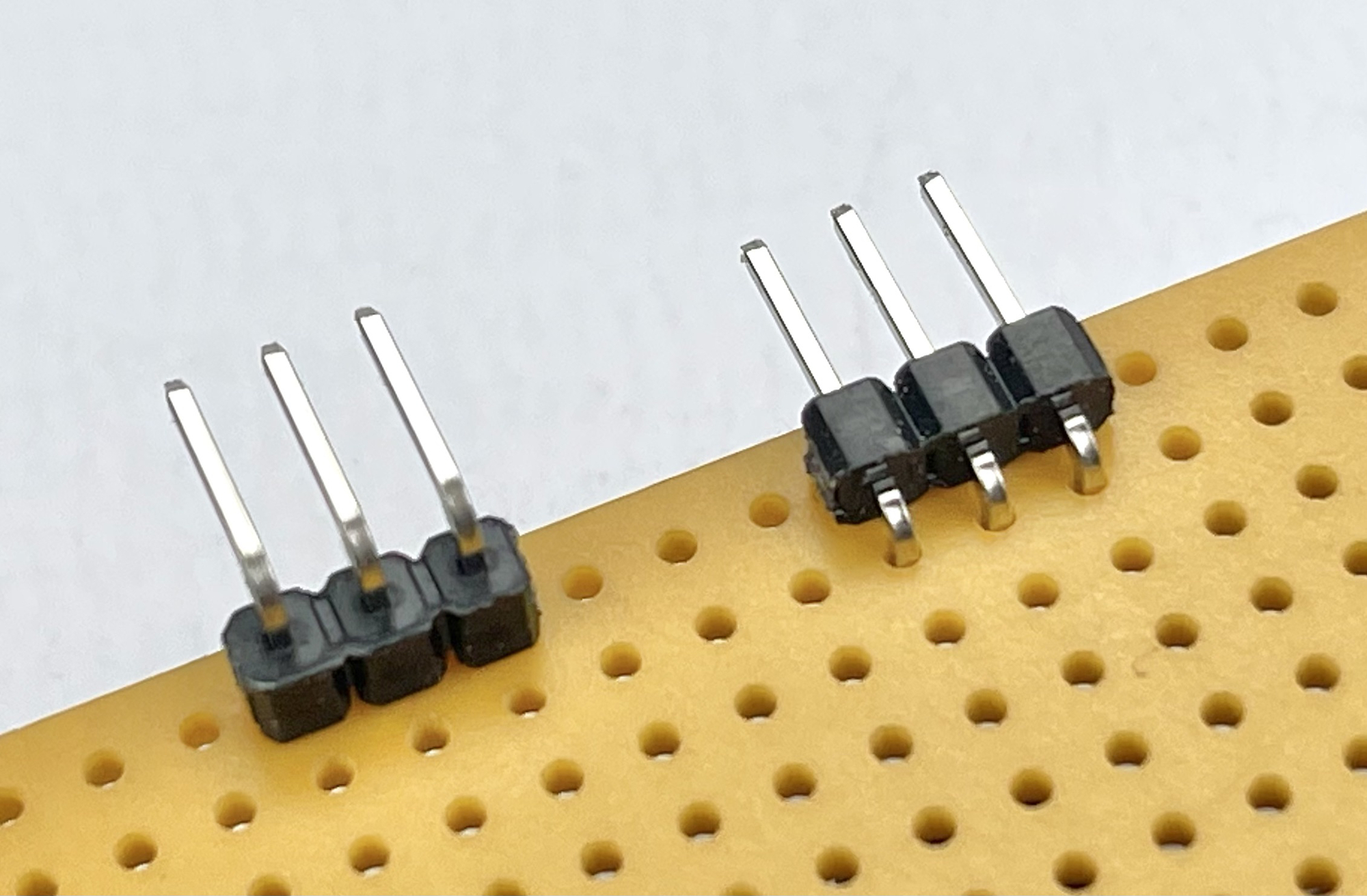
Het mooist is als de sensoren in een zo laag mogelijke behuizing kunnen worden ondergebracht en de opening voor de aansluiting mooi in het midden zit. Van de sensorboards die in de lage behuizing (hoogte 15 mm) werden ondergebracht, moesten daarom de haakse connectoren worden vervangen. De meeste sensormodules worden namelijk helaas geleverd met rechte of haakse 3-polige connectoren die hoog boven het sensorboard uitkwamen, zoals de connector links op de foto hier naast. Deze verwijderde ik en verving ik door de lagere z.g. ‘Reverse bending’ connectoren om inbouwhoogte in de behuizing te besparen (liggende connector rechts). De mogelijkheid tot solderen met hete lucht helpt hierbij, hoewel het ook mogelijk is de eerst het zwarte plastic weg te snijden en daarna de individuele pinnen te desolderen met een normale soldeerbout.
Alle in dit artikel besproken sensoren kunnen direct op 9 volt worden gevoed. Maar ook met een voedingsspanning van slechts 5 volt, bijvoorbeeld met de eerder besproken spanningsvoorzieningen, is het voor de sensoren met ingebouwde verschilversterker (LM393) mogelijk zelfs de klassieke fischertechnik 'Silberlingen' van weleer te schakelen voor wie wil experimenteren met schakelingen die met deze tastbare elektronica modules werden opgebouwd.
De IR-obstakelsensor, LDR-sensor en Hall-Effect sensor zijn uitermate geschikt als eind- of passeer-sensor in fabriekssimulaties of liftmodellen. Een groot voordeel is dat er, indien er met Silberlingen of elektronicamodules wordt gewerkt geen extra verschilversterkers zoals de Grundbouwstein voor de conventionele lichtsluis nodig zijn.
De PIR-sensor lijkt heel geschikt om een model aan te laten sturen door bewegingen van mens of dier. Een TXT controller heeft vanzelfsprekend geen probleem om de relatief lage signaalspanning van deze module te detecteren. Maar om deze te kunnen gebruiken als stuursignaal voor de 'Silberlingen' is een Grundbouwstein nodig. Een mogelijk aansluitschema hiervoor werd in het vorige deel reeds besproken.