
Toevaligerwijze kwam ik kort achter elkaar verwijzigingen naar de intrigerende figuren tegen die ik als kind tekende met de "Spirograph". Al snel duizelde het mij van de verschillende termen. Want wat is precies een 'cycloïde', 'hypocycloïde', 'epicycloïde' of 'trochoïde'? En zou het mogelijk zijn deze wonderlijke figuren, zowel op mechanische als elektronische wijze, te projecteren met een kleine halfgeleider laser?
Als experiment voerde ik de versnellingsbak met zes versnellingen dubbel uit. Nadat ik de mechanische oplossing in actie had gezien, bouwde ik de 'projector' met een aanzienlijk kleinere footprint op door de roterende spiegels elektronisch aan te sturen.
Een cycloïde is een wiskundige figuur. Het is het pad dat wordt afgelegd door een punt op een cirkel die over of langs een andere figuur (zoals een andere cirkel) rolt. Visueel erg markant zijn de hypocycloïden, waarbij een (tand)wiel binnenin een ander (tand)wiel rondgaat. Een stip op de omtrek van het binnenste tandwiel beschrijft, als we dit tandwiel draaien, een curve die we een hypocycloïde noemen. Zetten we het stipje niet op de rand, maar meer richting het draaipunt, dan noemen we deze curve een trochoïde. Hypo- is Grieks voor 'onder' en epi- is Grieks voor 'op'. Leggen we een klein tandwiel in een grotere, dan tekenen we hypotrochoiden, laten we een klein tandwiel buitenom het grotere rondgaan, dan verschijnen er epitrochoiden. Zonder het te beseffen tekenden wij als kinderen met de aloude Spirograph-tekenset dus al heuse trochoïden!
Lees meer over de wiskundige achtergrond van deze intrigerende figuren op de Wikipedia pagina over cycloïden. Daar komt ook de verhelderende animatie hiernaast vandaan.
Praktisch gezegd ontstaan cycloïden door een cirkelcurve (zoals de baan die de stip op het binnenste wiel beschrijft) met een bepaalde diameter, te ‘moduleren’ (te vermenigvuldigen) met een tweede cirkelcurve met een andere diameter (zoals het buitenste wiel waarover, of waarbinnen, het andere wiel rondgaat).
De verhouding tussen de straal van het buitenste en het binnenste (tand)wiel bepaalt de vorm van de cycloïde. De uitleg met kleine animaties op de (Engelstalige) Wikipagina over hypotrochoïden verduidelijkt de materie en maakt tevens duidelijk dat er binnen de familie van de cycloïden diverse specifieke varianten zijn. Naast de gebruikelijke puntige cycloïden, zijn er zowel verkorte als uitgerekte (buitenlangs gaande) epicycloïden, (de omtrek volgende) pericycloïden en (binnenlangs gaande) hypocycloïden, die respectievelijk epitrochoïden, peritrochoïden en hypotrochoïden worden genoemd. Duizelt het je al? 🤓
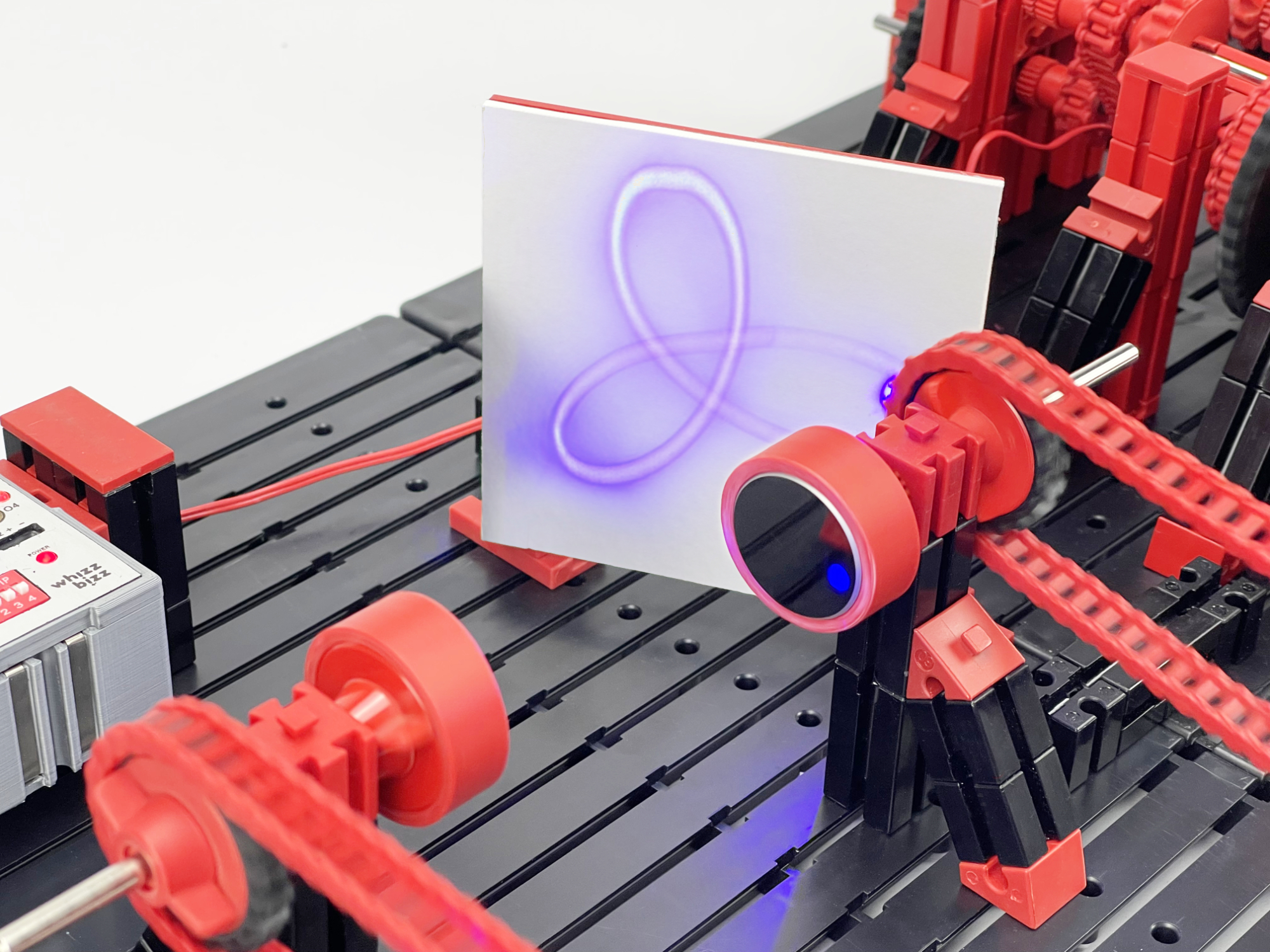
Wanneer deze lichtstraal op een tweede ‘wiebelende’ spiegel valt, beschrijft de uiteindelijke lichtstraal een cycloïde-curve. De eerste spiegel zou dan de bijdrage aan de resulterende curve van het ene tandwiel representeren. Deze (cirkelvormige) lichtcurve, wordt vervolgens ‘gemoduleerd’ door de tweede spiegel, vergelijkbaar met de invloed van het andere tandwiel. Bij dergelijke curves beschrijft het laser-lichtpunt al snel een pad dat niet helemaal binnen de omhullende, grootste, cirkel valt. Dergelijke cycloïden zou men hypotrochoiden kunnen noemen. De figuren vertonen grote overeenkomsten met de mathematische Rose figuren.
De uiteindelijke gevormde figuur is, net als bij de tandwiel-verhoudingen van de Spirograph, afhankelijk van de verhouding tussen de twee draaisnelheden van de spiegels. De matrix hierboven geeft een indruk van de vormen die ontstaan bij verschillende verhoudingen n/d. Merk op dat als beide spiegels precies dezelfde draaisnelheid hebben, het resultaat een eenvoudige (relatief kleine) cirkel is. Hetzelfde gebeurt als één van de spiegels simpelweg niet draait. De in de afbeelding getoonde Rose figuren missen de opening in het midden van de verschlungenen trochoïden die met de Spirograph kunnen worden getekend. Maar met enige fantasie is te zien dat de bloemachtige figuren uit de eerste regel bij complexere verhoudingen over gaan in de figuren die we kennen van de Spirograph uit onze jeugd.
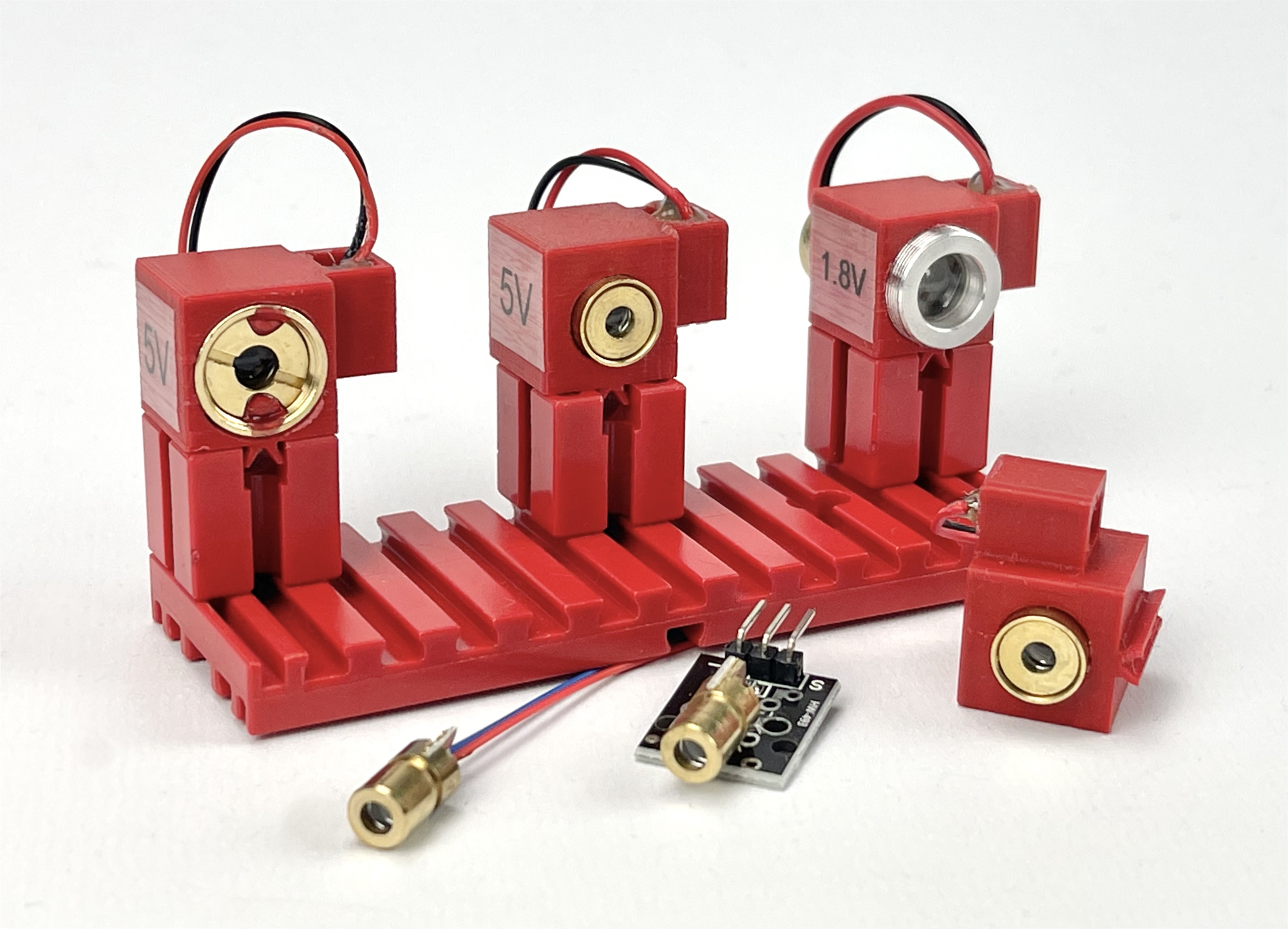
Voor diverse experimenten en projecten bleek ik reeds een aantal verschillende halfgeleiderlasers te hebben verzameld. Diverse rode (650nm), een blauw (450nm) en een groen (532nm) exemplaar. Geen van deze lasers is echt sterk gefocust. De laser stip heeft toch snel een diameter van enkele millimeters. Daarbij hebben de lasers met laag vermogen (<50 mW) eigenlijk te weinig lichtopbrengst voor projectie. De geprojecteerde figuren zijn bij daglicht nauwelijks zichtbaar. Uiteindelijk gebruikte ik daarom simpelweg de laser met het meeste vermogen: een blauwe laser die met 100 mW een aanzienlijk hoger vermogen heeft en daardoor beter herkenbare geprojecteerde figuren oplevert.
Hoewel deze lasers relatief zwak zijn, kunnen ze toch oogschade veroorzaken als je er direct in kijkt. Dus, zoals met alle lasers, is enige voorzichtigheid geboden. Een diameter van 30 mm bleek voor de spiegeltjes voldoende. Door de spiegels iets dichter bij elkaar te plaatsen, kon zelfs met 20 mm doorsnede worden volstaan. Van belang is slechts dat de cirkel curve die door de eerste spiegel wordt gevormd, geheel op de tweede spiegel valt. In principe zijn kleine spiegels van een inspectietelescoop, tandarts- of makeup-set ook uitstekend bruikbaar. Voor mijn allereerste experimenten sneed ik simpelweg kleine ronde spiegeltjes uit reflecterend PVC-plaat die ik onder een lichte hoek op een fischertechnik naaf plakte met een lijmpistool.
Wie het echt goed wil doen koopt online een paar optische oppervlakspiegels. De reflecterende laag zit hier op het oppervlak van de spiegel en de laserstraal hoeft niet eerst door het transparante glas (waarvan het oppervlak ook al een deel van het licht zal weerkaatsen). Hierdoor worden ‘geest-reflecties’ vermeden en wordt het uiteindelijk geprojecteerde beeld niet onnodig ‘vertroebeld’.
Uiteindelijk ontwierp ik een paar verschillende houders voor de spiegeltjes. Het plateau met de spiegel maakt hierbij een hoek van 4 graden met de naaf of het plateau zodat de draaiende spiegel vanzelf gaat ‘wiebelen’.
Om de twee roterende spiegels op mechanische wijze verschillende onderlinge draaisnelheden vanuit één gemeenschappelijke motor te geven, zou idealiter een mechanische versnellingsbak moeten worden gebouwd met twee uitgaande assen waarvan de draaisnelheden individueel regelbaar zijn.
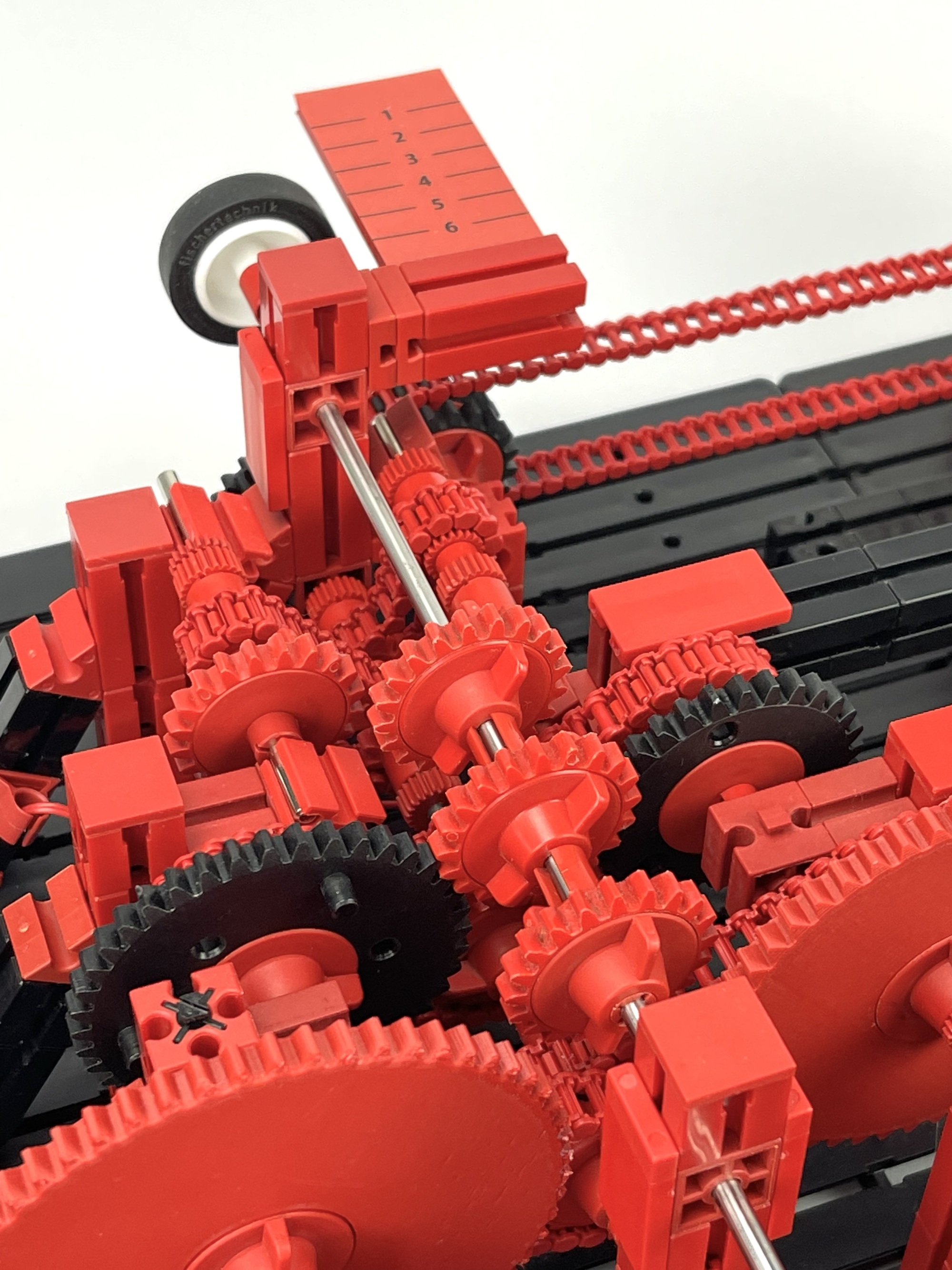
Om zo veel mogelijk verschillende hypotrochoiden te kunnen maken, zou een versnellingsbak met zo veel mogelijk gehele opvolgende versnellingen ideaal zijn. Het mooist zou het zijn als het zou lukken een mechanische versnellingsbak te maken waarbij bijvoorbeeld de verhoudingen 1:1, 1:2, 1:3, 1:4, 1:5 en 1:6 gemaakt zouden kunnen worden. Indien deze door een enkele motor aangedreven versnellingsbak uiteindelijk dubbel wordt uitgevoerd is het mogelijk een heel matrix van 6 bij 6 (dus ook bijvoorbeeld de verhoudingen 3:4 en 5:4 enz) van de matrix met de Rose figuren hierboven te projecteren.
Het leek me gemakkelijk voor de constructie mijn favoriete constructiemateriaal fischertechnik te gebruiken. De tandwielen met tien (Z10), twintig (Z20), dertig (Z30) en veertig (Z40) tanden zouden dan direct al ter beschikking staan. De tandwielen Z50 en Z60 behoren echter niet tot het standaard fischertechnik assoriment, maar daarvoor bood de 3D printer uitkomst.
Het eerste prototype van de versnellingsbak rustte ik uit met drie Z10 tandwielen op de schuivende uitgaande as. De onderlinge afstanden van de reeks van zes aandrijvende tandwielen zijn zodanig gekozen dat elk Z10 tandwiel op de centrale as zich slechts door twee aandrijftandwielen in de gehele slag van (6 x 7½ =) 45 mm laat aandrijven. In de afbeelding hiernaast is het principeschema getekend. Elke stippellijn is een afstand van een halve ‘fischertechnik-unit’ van 15 mm en representeert dus een afstand van 7½ mm.
Om de invloed van de mogelijke draaisnelheidsratio’s op de verschillende geprojecteerde figuren gemakkelijk te kunnen vergelijken, zou de versnellingsbak idealiter kunnen worden geschakeld terwijl hij draait. Hierbij werd het duidelijk dat het gebruik van tandwielen Z10 op de centrale as niet ideaal was. Dit tandwiel heeft eigenlijk een te kleine omtrek voor de modulo 1,5 vertanding. Omdat de diameter van het wiel te klein is, zijn de tanden te ver ‘ondersneden’ en vormen niet de ideale maatvoering. Hiervoor wordt het schakelen moeilijker en ontstaat er meer speling. In een vervolgmodel verving ik daarom deze schakelende tandwielen op de hoofdas door drie Z20 exemplaren. De instelbare verhoudingen per zijde van de versnellingsbak werden daardoor echter ½, 1, 1½, 2, 2½ en 3. Hoewel de uitgaande draaisnelheid hiermee dus halveert, blijven de verhoudingen behouden, schakelt de vernellingsbak gemakkelijker en loopt deze aanzienlijk geruislozer.
Van de constructiezoektocht naar de versnellingsbak met zes oplopende versnellingen maakte ik een filmpje waarop deze in actie te zien (en te horen!) is. Eerst is de schuivende motoras met drie tandwielen met slechts 10 tanden zichtbaar, later het 'verbeterde' model met Z20 tandwielen op de centrale as.
Voor het maken van de projecties was het echter natuurlijk nodig dat er twee spiegels konden worden aangedreven. Voor het vervolg diende de versnellingsbak daarom nogmaals gebouwd te worden. Dit tweede exemplaar is in spiegelbeeld opgebouwd en de uitgaande as heeft direct al de gewenste tegengestelde draairichting.
Omdat ik de mogelijkheid had, ontwierp en printte ik enkele maatwerk-onderdelen voor het aandrijvingsdeel van de versnellingsbak. De tandwielen Z50 en Z60 werden hierboven reeds genoemd. Voor het afnemen van de draaibeweging van de schuivende hoofdas, ontwierp ik een verdikt model Z20. Voor andere toepassingen is dit ‘Z20-tonnetje’ eventueel nog modulair te verlengen met telkens 10 mm tussenschijven. De STL bestanden om deze onderdelen zelf te (laten) printen vindt u hier.
Omdat ik toch bezig was, verving ik de aanvankelijk geïmproviseerde montageoplossingen (leve het lijmpistool!) voor de lasers en de ‘wiebelende plateaus’ voor de spiegels door zelfontworpen, 3D geprinte, oplossingen.
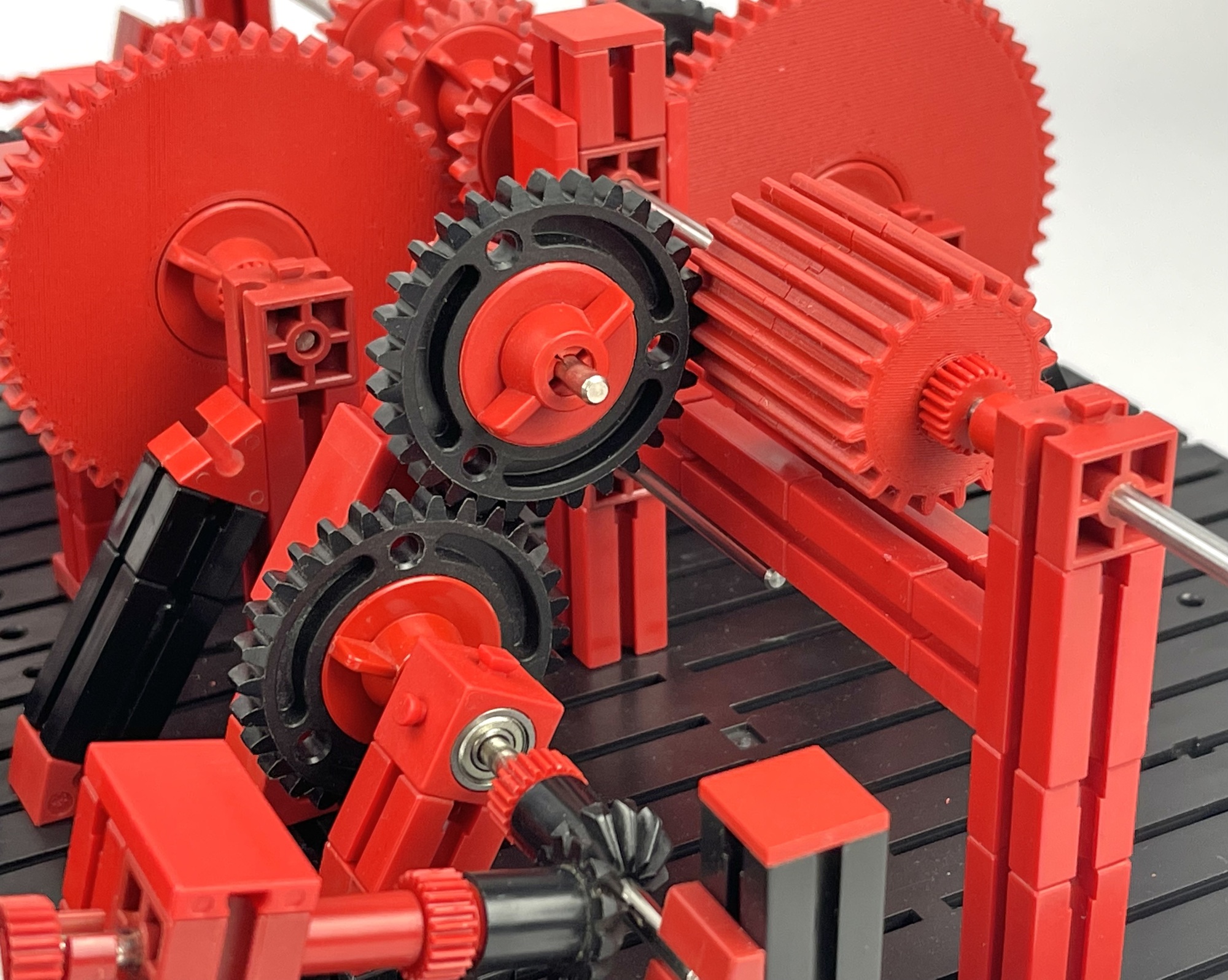
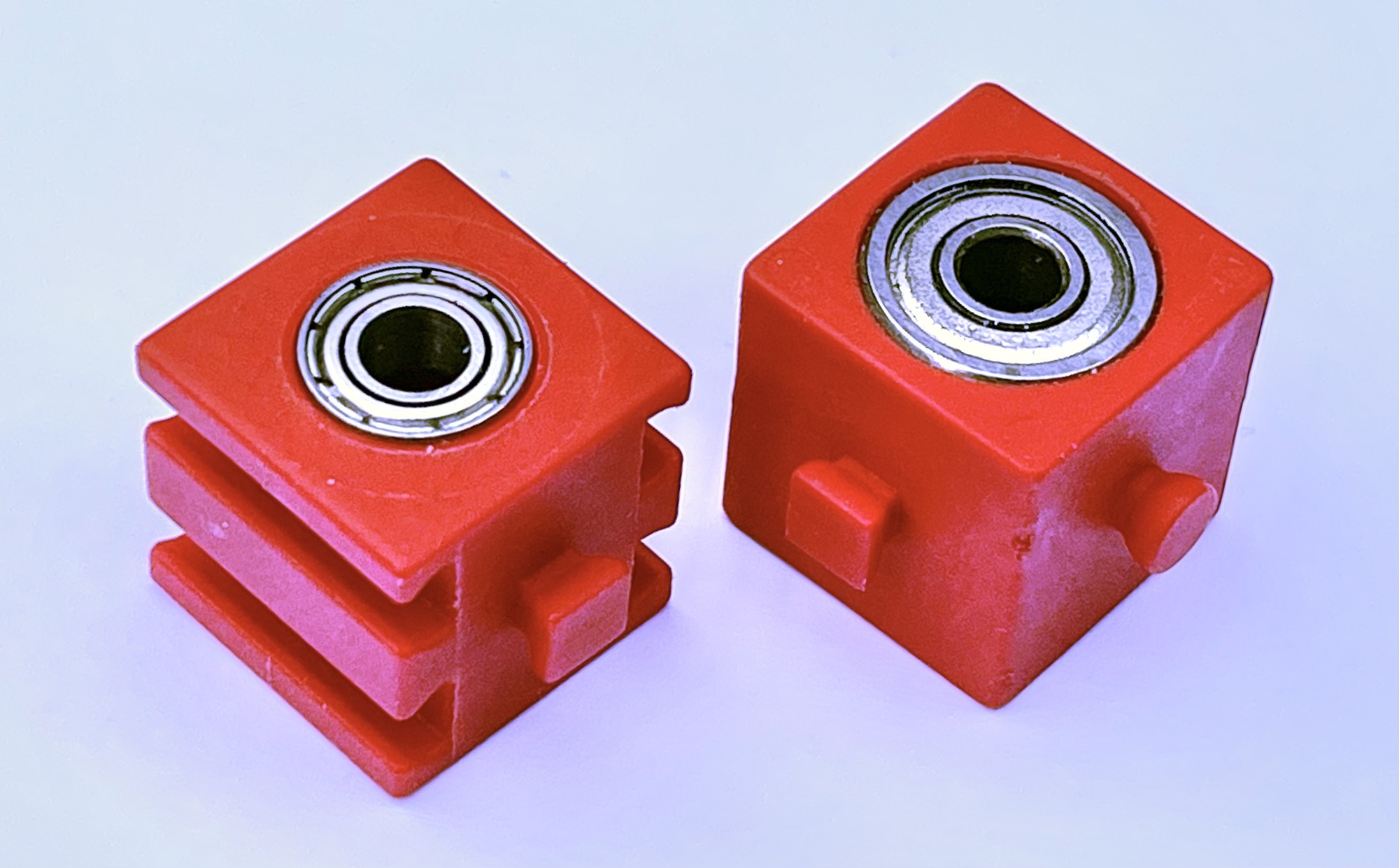
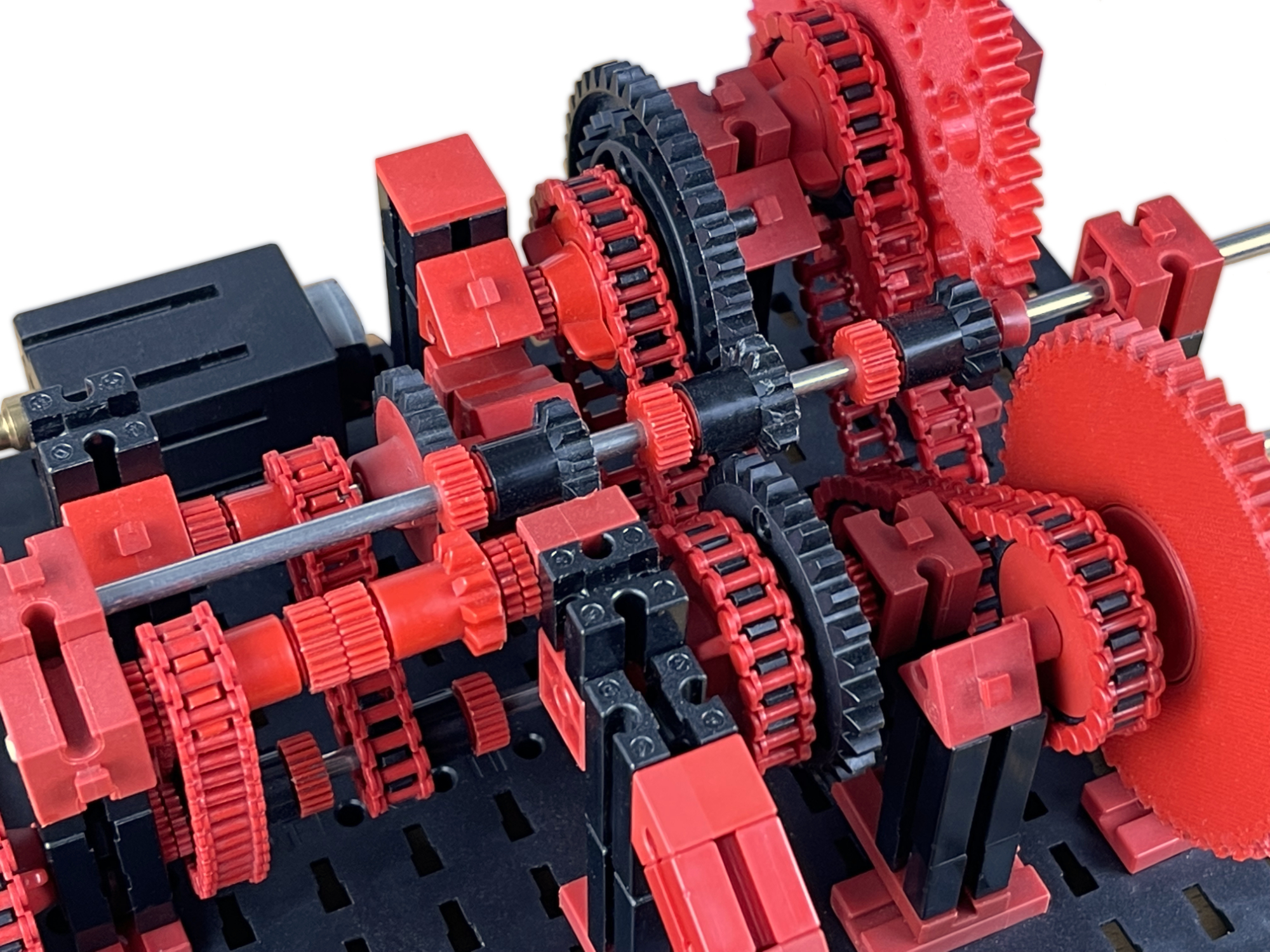
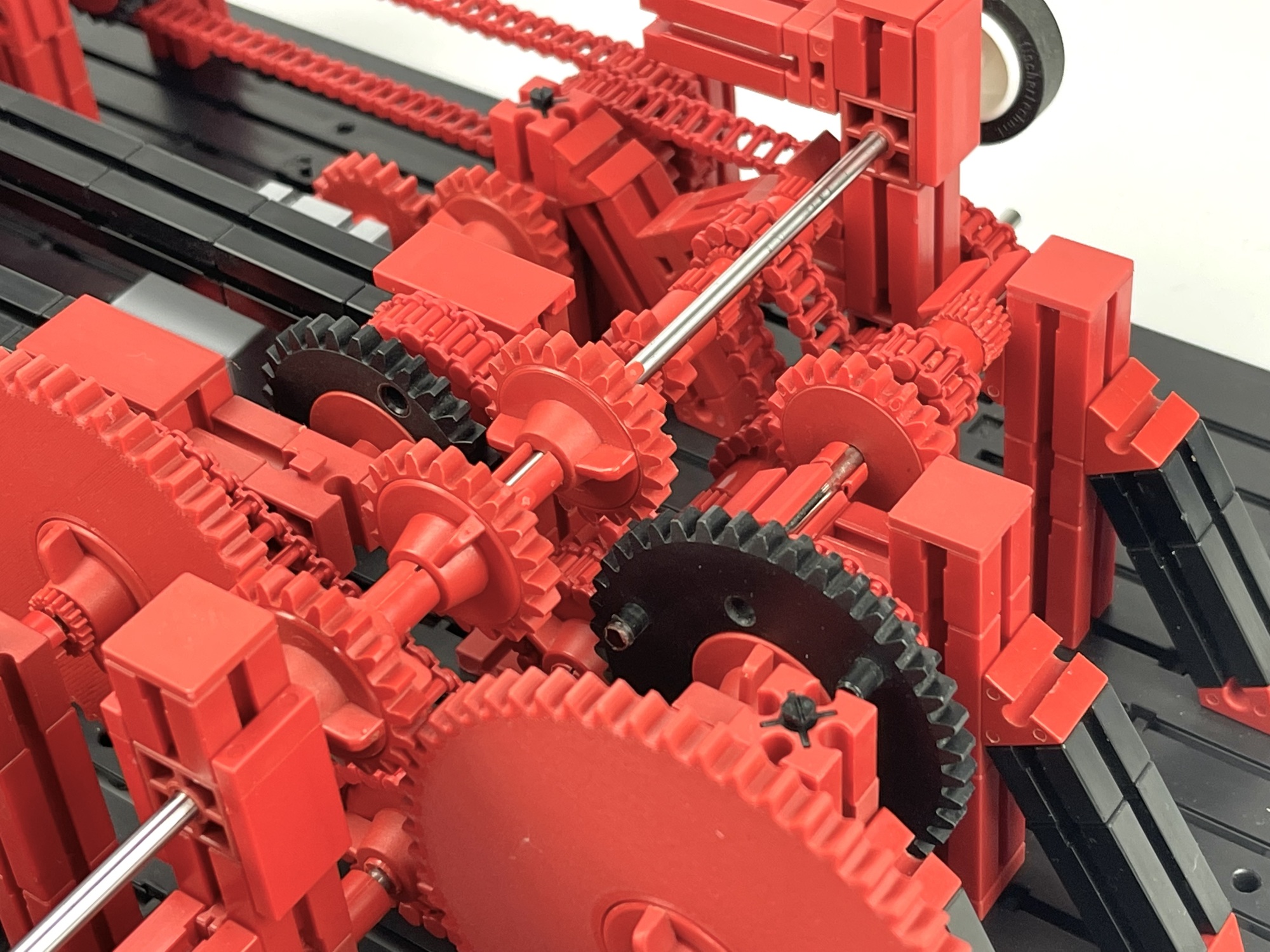
Met de dubbele versnellingsbak is het mogelijk om de figuren op volledig mechanische wijze te ‘tekenen’. Echter, wie zoals hier uit één motor twee individueel instelbare draaisnelheden wil maken, loopt tegen praktische problemen aan. Het totaal aantal overbrengingsmomenten en tandwielen in de complete constructie nam snel toe. Het uiteindelijke mechaniek van de dubbel uitgevoerde versnellingsbak telt maar liefst 58 tandwielen en 16 kettingoverbrengingen! Om de draaiweerstand zo veel mogelijk te beperken, gebruikte ik daarom bijna overal waar mogelijk kogellagers.
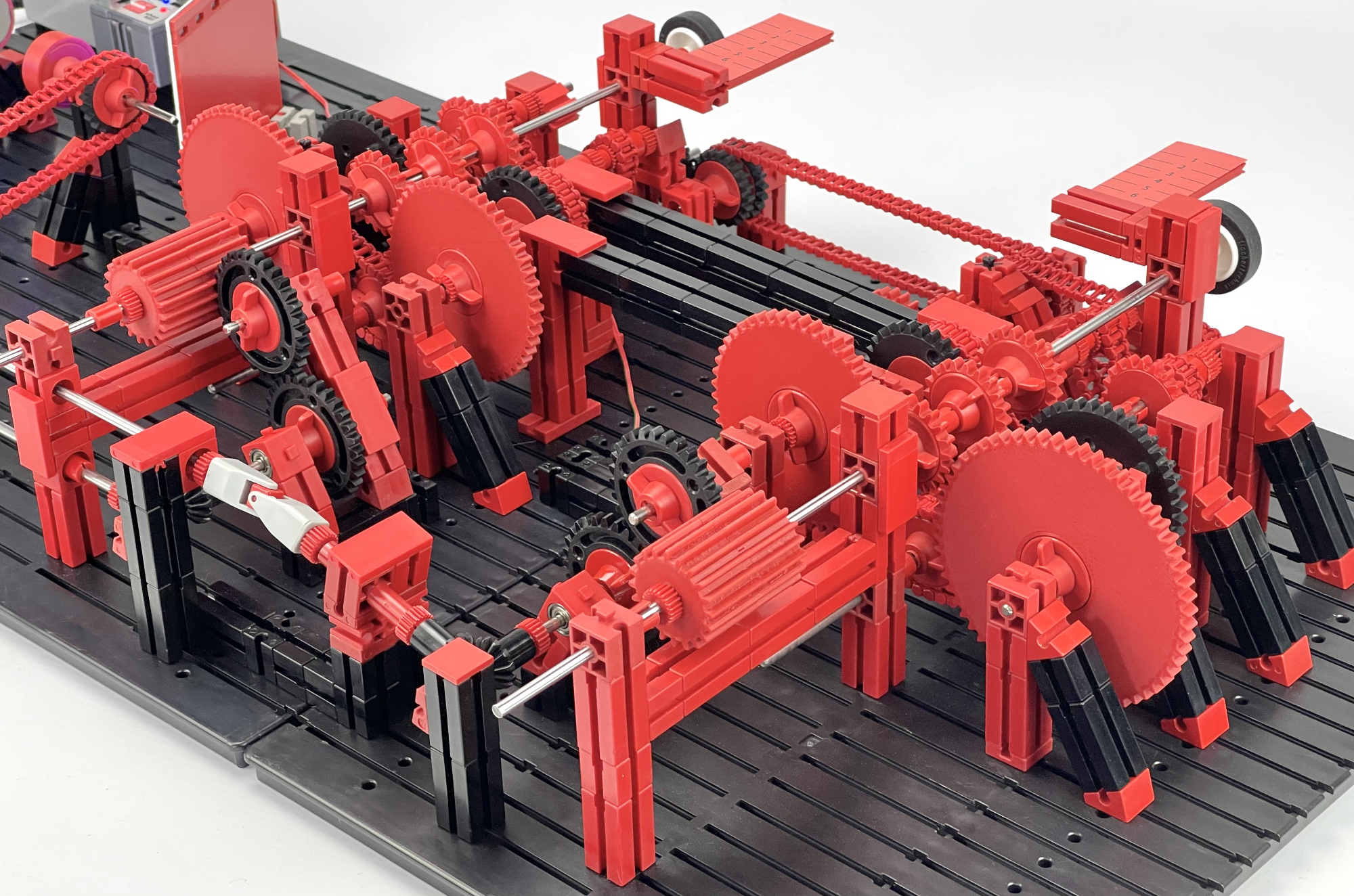
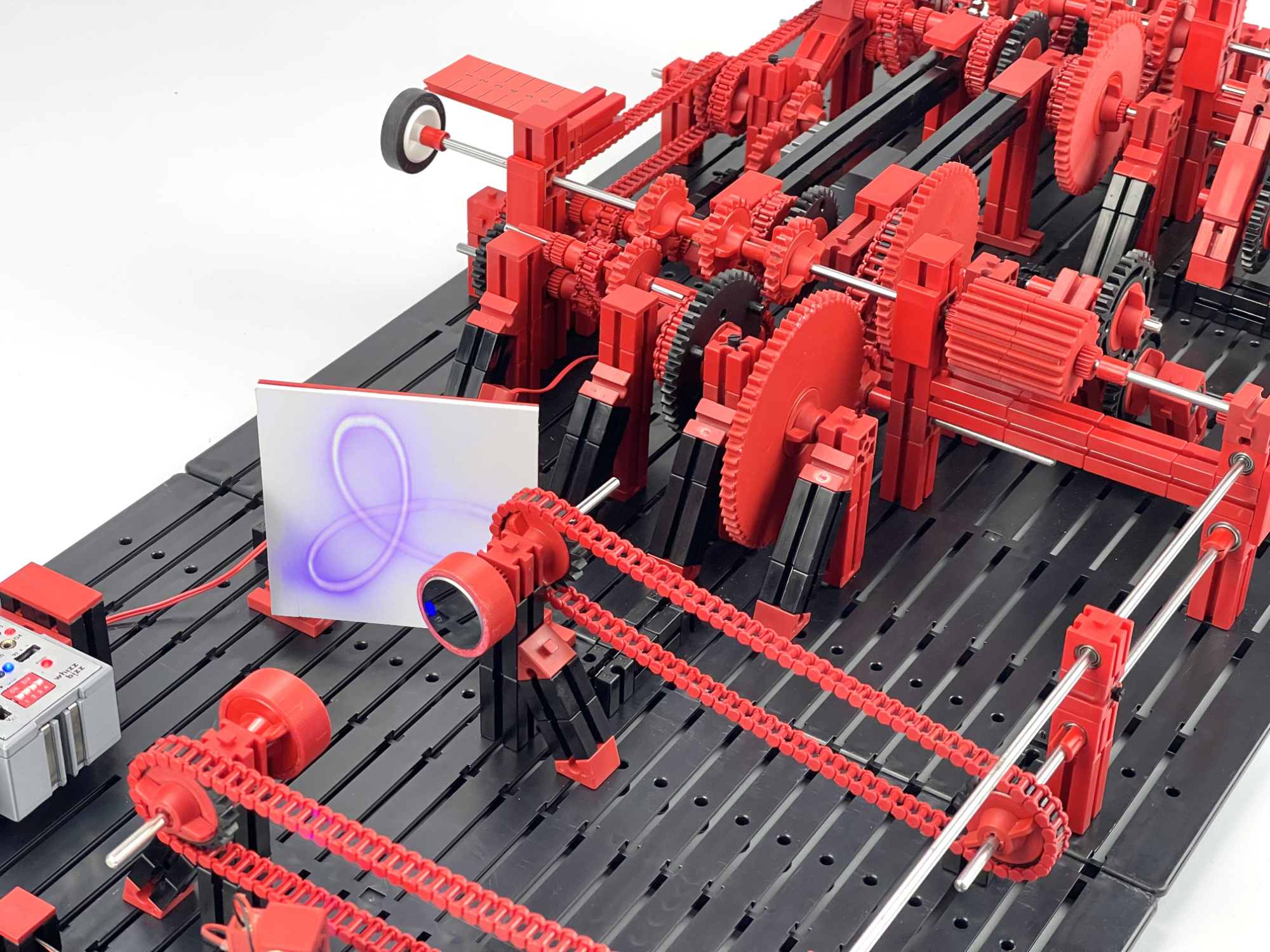
De instelbare overbrenging werkte, en levert op zich stabiele ‘stilstaande’ figuren op doordat de individuele draaibewegingen uit één enkele motor-bron worden afgeleid. Maar er bleef met zoveel tandwielen en kettingoverbrendingen onvoldoende draaimoment over om de draaisnelheden van de uiteindelijke spiegels nog eens flink te versnellen. Omdat er vooral in de kegel-tandwielen relatief veel koppel verloren gaat, draaien en oscilleren de spiegels met een snelheid van slechts 4 tot maximaal 25 Hz. Zelfs de hoogste snelheid is te langzaam om de voor het duidelijk herkennen van de figuren benodigde ‘persistance of vision’ te behalen. De projectie bestaat uit een zich langs het pad van de figuur bewegende laserstip. Voor de foto’s kon dat worden opgelost met een relatief lange sluitertijd. De figuren zijn echter duidelijk te herkennen en het is goed zichtbaar dat de hoekpunten van de Rossette figuur telkens precies op hetzelfde punt vallen.
Nog even heb ik overwogen om bv. met forforiserend papier op het projectiescherm te gaan werken, maar het leek me zinvoller om, na deze mechanische proof-of-concept, de sturing elektronisch uit te voeren.
Als de twee spiegels direct kunnen worden aangedreven door hun eigen motor, kan de draaisnelheid er van vanzelfsprekend eenvoudig individueel worden geregeld en flink worden verhoogd. Om zicht te houden op de verschillende draaisnelheden (en vooral de verhoudig hiertussen) zal de uitdaging zich verleggen naar de snelheidsregelingen. Ik koos voor mijn Zauberling, die standaard reeds voorziet in een dubbele motorregeling.
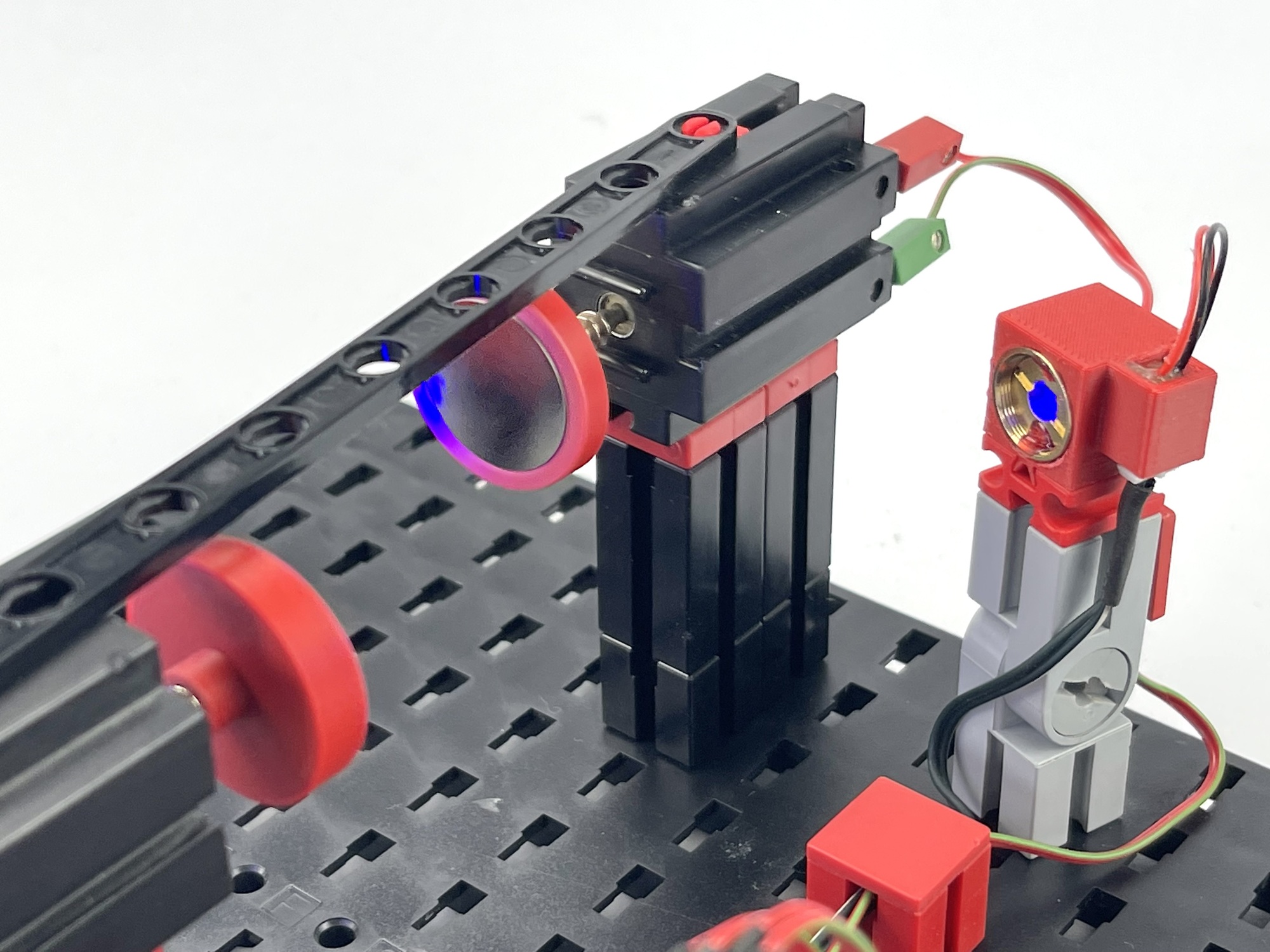
Voor de directe montage op de motoras, koos ik voor kleine oppervlaktespiegels met een diameter van 20 mm. De 3D geprinte spiegeltableaus hebben een opneemhuls met een gat van 4.5 mm en passen direct op de wormas van een fischertechnik Mini- of S-motor. Noodzakelijk zijn deze zelfgeprinte onderdelen niet, het is ook mogelijk om de spiegeltjes met een flinke dot lijm uit het lijmpistool direct (tijdelijk) op de wormas van de motor te monteren.
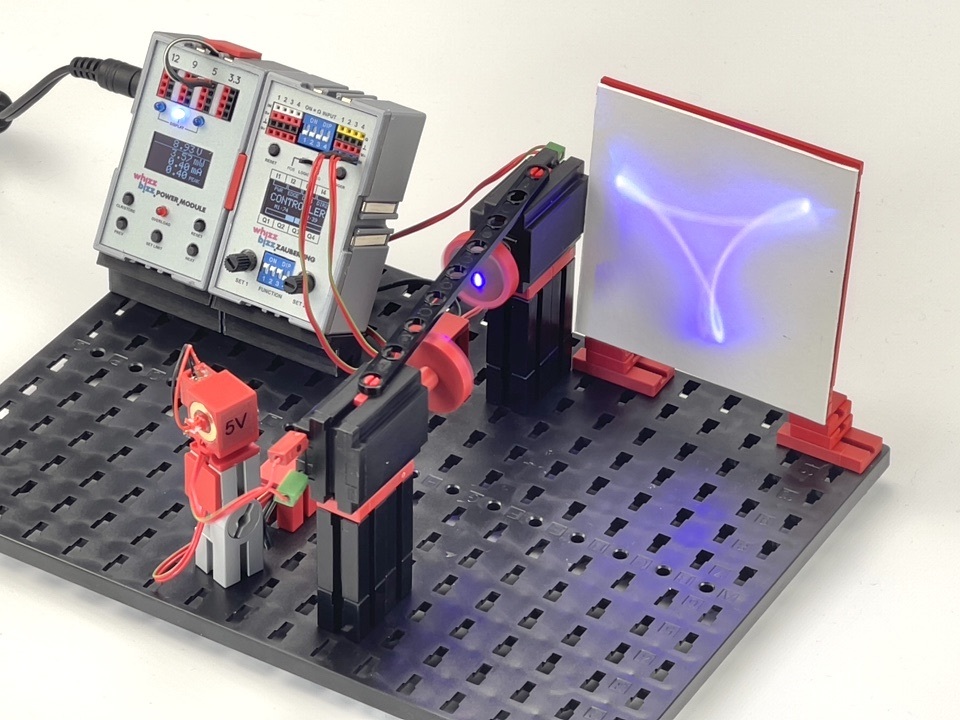
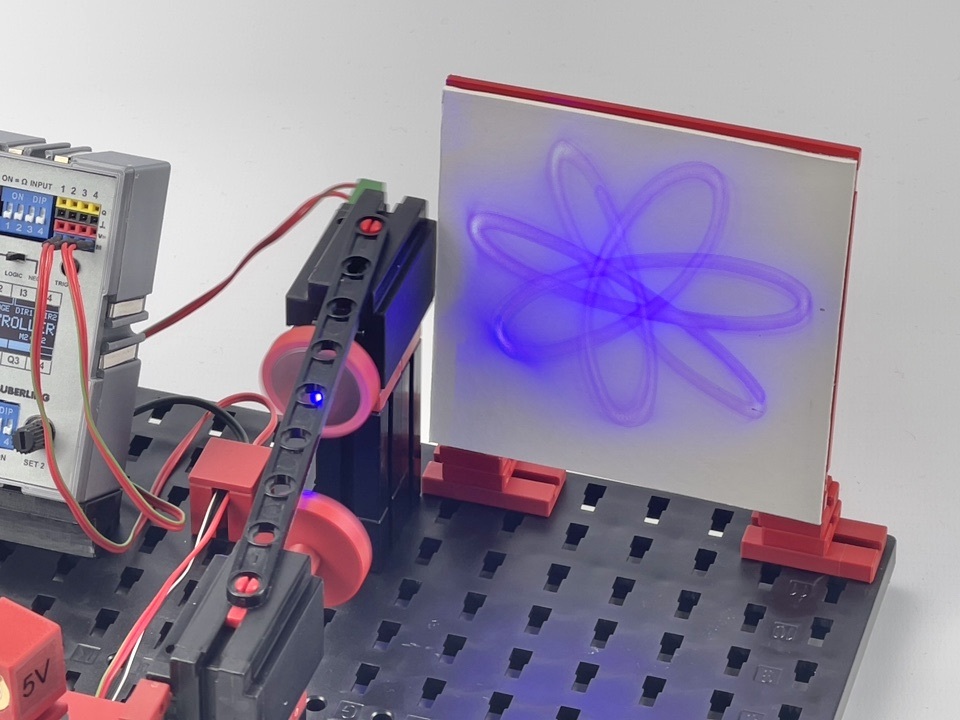
Hoewel ik verwachtte dat de geprojecteerde figuren, doordat twee volledig individuele motoren worden gebruikt, onstabiel zouden zijn, bleek het in de praktijk redelijk eenvoudig de draaisnelheidsratio’s zodanig te variëren dat de verschillende figuren uit afbeelding 3 stabiel werden geprojecteerd. Door de traploze variaties werd het bovendien mogelijk ze langzaam in elkaar te laten overgaan.
Zoals verwacht vereenvoudigt een elektronische aansturing met een microcontroller het model aanzienlijk. Het geheel paste nu op één kleine bouwplaat in plaats van meerdere aaneengeschakelde grote bouwplaten. Toch hebben beide benaderingen hun eigen technische voordelen en mogelijke toekomstige experimenteeruitdagingen. Zo moet niet uit het oog worden verloren dat bij de mechansche oplossing de twee draaisnelheden middels tandwielverhoudingen van één onderliggende draaisnelheid worden afgeleid. Hierdoor staat het geprojecteerde figuur altijd stabiel en volgen de draaisnelheidverhoudingen heel precies de geschakelde overbrengingsverhoudingen van de geschakelde tandwielen.
De draaisnelheidsverhouding van twee motoren met separate elektronische aansturing is vanzelfsprekend lastiger te synchroniseren. Elke motor is in beginsel vrijlopend met zijn eigen elektromechanische eigenschappen waardoor er faseverloop zal optreden. De uiteindelijk geprojecteerde figuur kan hierdoor gaan tollen en draaien. In de meeste gevallen bood handmatige fijnregeling dan uitkomst, maar een mogelijke verfijning zou nog kunnen zijn de motorregeling zodanig aan te passen dat vooral de bepalende draaisnelheidsverhouding kan worden geregeld in plaats van twee individuele draaisnelheden. Een andere mogelijk nuttige toekomstige uitbreiding is het verlopende snelheidsverschil te minimaliseren door de werkelijk gemeten draaisnelheden te meten en terug te koppelen naar de motorregeling.
Om dit alvast voor te bereiden en sowieso een betere indruk te krijgen van de precieze onderlinge draaisnelheidverhoudig van de twee separate motoren, maakte ik alvast een prototype van een rpm-meter met een Arduino Uno en een LCD-shield. IR-obstacle sensoren meten het passeren van een reflecterende strook en de verschillende snelheden kunnen op het display worden afgelezen. Ik voegde ook direct een modus toe waarin direct de overbrengingsverhoudig kan worden afgelezen op het display.
Het meten van de daadwerkelijke draaisnelheden van de twee spiegels, of zelfs het terugkoppelen van deze waarden in de aansturing, zijn mogelijk interessante vervolgprojecten.