
Enige tijd geleden dacht ik met een fischertechnik-clubgenoot mee over een model waarin een achtvormige beweging moest worden uitgevoerd. De uitdaging was een element, zoals bijvoorbeeld een karretje of kogel, een pad volgens een 'strikvorm' of 'lemniscaat'-curve te laten beschrijven. Dit levert een beweging op die zichzelf in het middelpunt kruist. Als dat geen uitdaging is...
In het onderzoek naar de mysterieuze lemniscaat, kwam ik enkele interessante wetenswaardigheden tegen. Daarna probeerde ik enkele methoden uit en bouwde voor de gelegenheid een motorsturing om het toerental van de motor te kunnen regelen.
De term “lemniscaat” is afgeleid van het Griekse woord voor hangend koord of bloemenslinger. Als meetkundig figuur kent deze vorm een lange geschiedenis en verwierf niet alleen wiskundige, maar ook symbolische betekenis. Zo staat de vorm model voor het symbool voor oneindig (∞) in de wiskunde en wordt het gebruikt als symbool van het eeuwige leven en de wisselwerking van tegengestelde krachten. In het tarot-kaartspel balanceert een figuur twee pentakel-munten of talismannen in een lemniscaat om de oneindigheid en eeuwigheid te verbeelden. Ook komt de lemniscaat indirect voor in de natuur: Wie een stokje in de grond zet en een jaar lang elke dag op hetzelfde tijdstip de top van de schaduw die de zon maakt markeert op de grond, zal uiteindelijk deze achtvorm ook zien verschijnen.


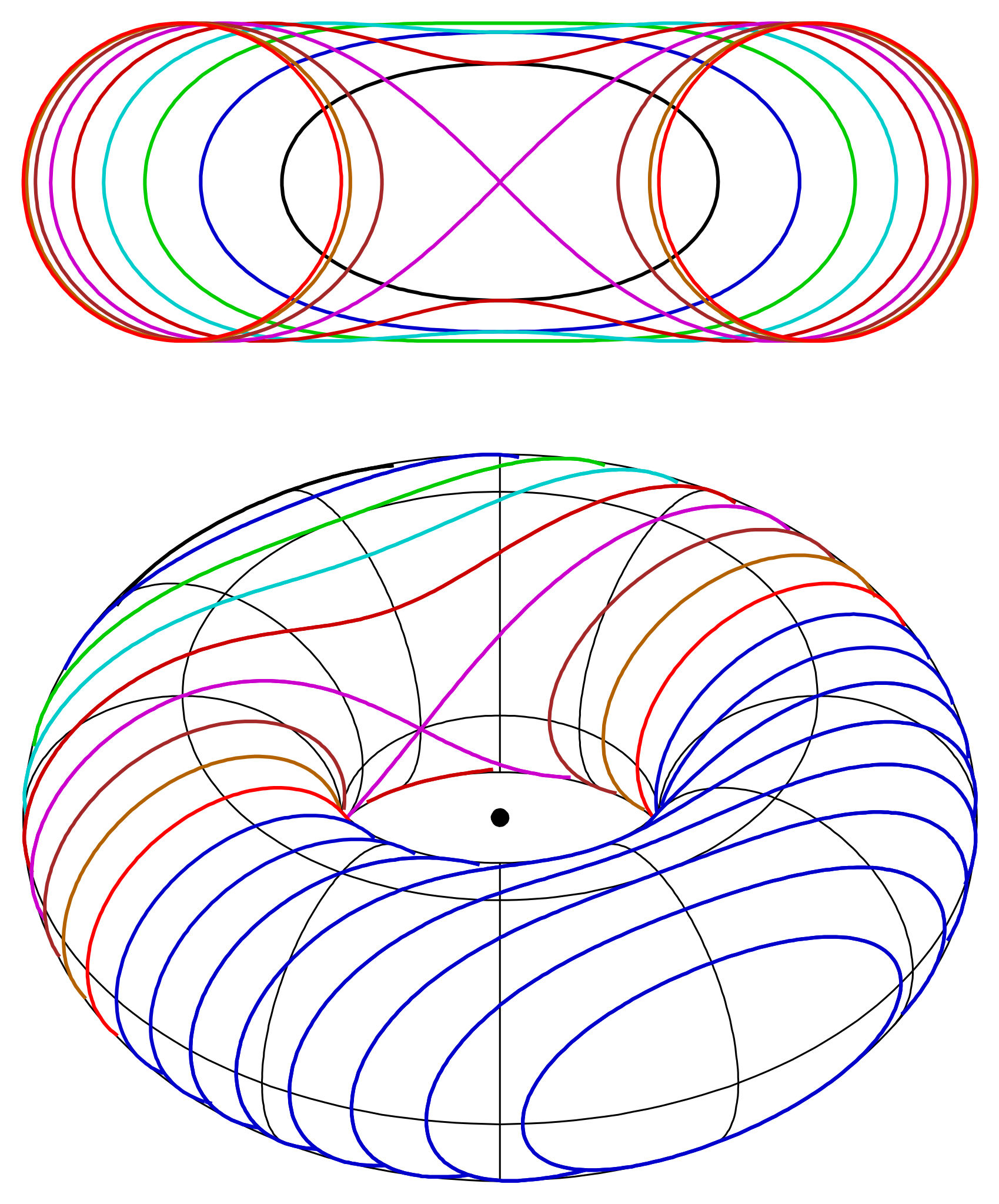
De wiskundige relevantie van krommen met een achtvorm schijnt het eerst te zijn onderkend door Proclus, een Griekse neoplatonistische filosoof en wiskundige die in de 5e eeuw na Christus leefde. Proclus beschouwde de dwarsdoorsneden van een torus door een vlak evenwijdig aan de as van de torus. Zoals hij opmerkte, bestaat de dwarsdoorsnede voor de meeste van dergelijke secties uit één of twee ovalen; wanneer het vlak echter raakt aan het binnenoppervlak van de torus, neemt de doorsnede een achtvorm aan. Deze vorm deed hem denken aan de boeien waarmee twee voeten van een paard tijdens transport bij elkaar kunnen worden gehouden. Proclus noemde de vorm daarom de “paardenboei” of “hippopede” (Grieks: ἱπποπέδη). De naam “lemniscaat van Booth” voor deze curve dateert uit de studie door de 19e-eeuwse wiskundige James Booth (1810 -1878).
Wie zelf verder onderzoek doet naar deze vorm, komt er al snel achter dat er verschillende varianten zijn. Zoals de lemniscaat van Bernoulli (Grieks: λημνίσκος, band) die werd voorgesteld door Jakob Bernoulli in een artikel in zijn Acta Eruditorum (1694). Of het lemniscaat van Gerono. Een aan de zijkanten meer afgeplatte variant van de Franse wiskundige Camille-Christophe Gerono (1799-1891).
Een hippopede van Booth is symmetrisch ten opzichte van zowel de x-as als de y-as, en laat zich wiskundig beschrijven als:

waarbij de factoren a>0 en b>0. Naarmate deze factoren verder uiteen gekozen worden, zal de lemniscaat in plaats van uitgerekte elipsen uit steeds zuiverdere cirkels bestaan. In de handige online visualisatie-tool GeoGebra laat zich dat mooi visualiseren. Voor de rode curve zijn dezelfde factoren als globale schaalfactor gebruikt en geldt de formule:

terwijl voor de groene curve de factoren omgekeerd evenredig gekozen zijn:

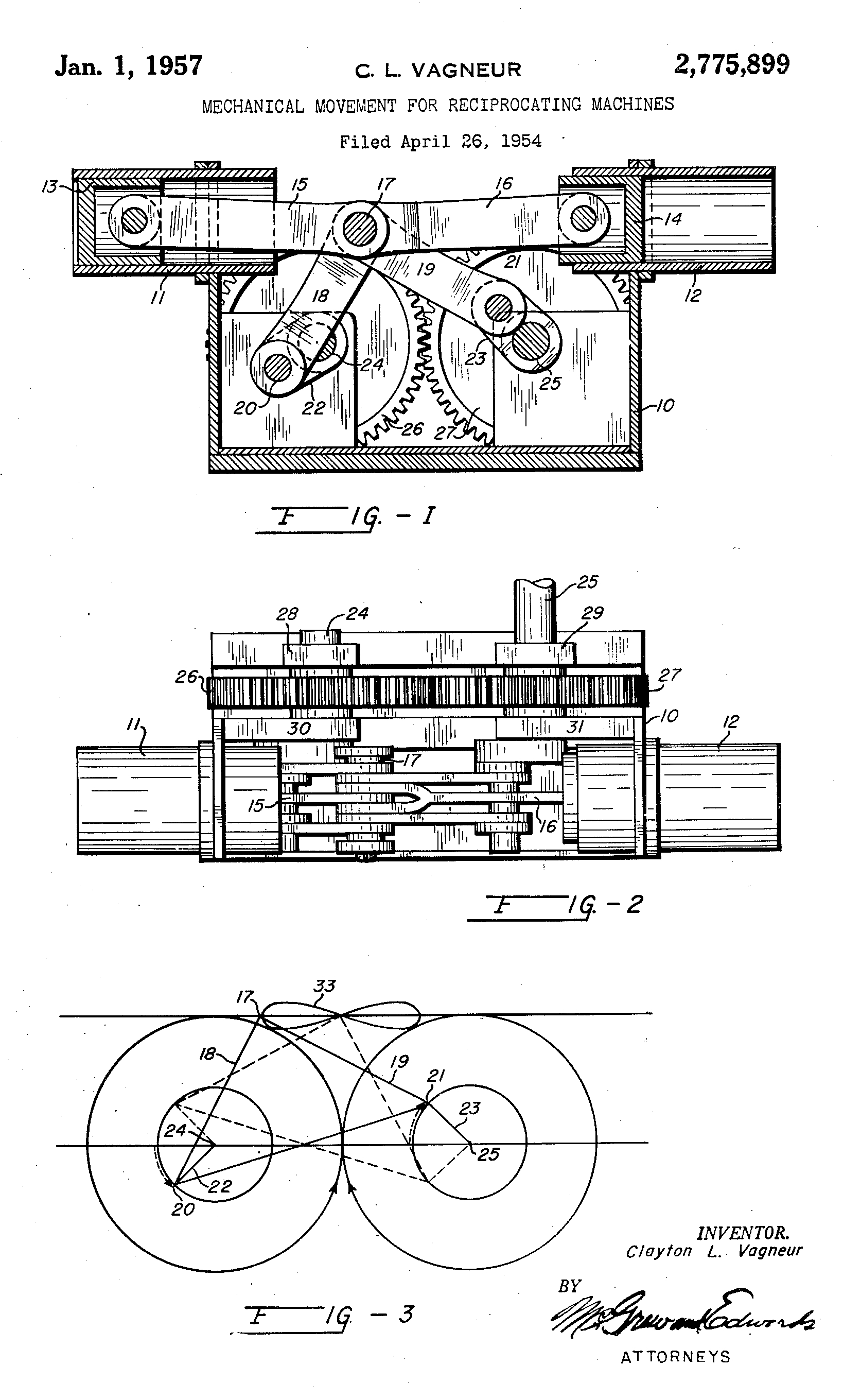
Een logische eerste stap leek een zo zuiver mogelijke lemniscaatvorm mechanisch te laten beschrijven met een fischertechnik model. Geïnspireerd geraakt door een artikel over Jansen’s ‘Strandbeesten’, zocht ik naar een variant op het ‘benen-mechaniek’ waarmee de achtvorm door middel van stangen en overbrengingen zou kunnen worden gemaakt. Enkele bouwexperimenten en een zoektocht online leidden uiteindelijk tot een interessant verhaal over een uitvinder die er in de jaren negentig van de vorige eeuw achter kwam dat zijn idee reeds in 1957 gepatenteerd was door ene Clayton L. Vagneur. De gehele beschrijving van dit patent is online beschikbaar.
Vagneur’s uitgangspunt was overigens niet de lemniscaat-curve mechanisch te reproduceren. Het ging hem om een overbrenging die zo min mogelijk zijwaartse druk uitoefende op een zuiger. Hij deponeerde met zijn patent een algemene methode om een draaïng om te zetten in een reciproke (schuivende) beweging voor toepassing in verbrandingsmotoren en pompen. In zijn originele schets valt echter direct de lemniscaat-vorm (curve nr. 33) op.
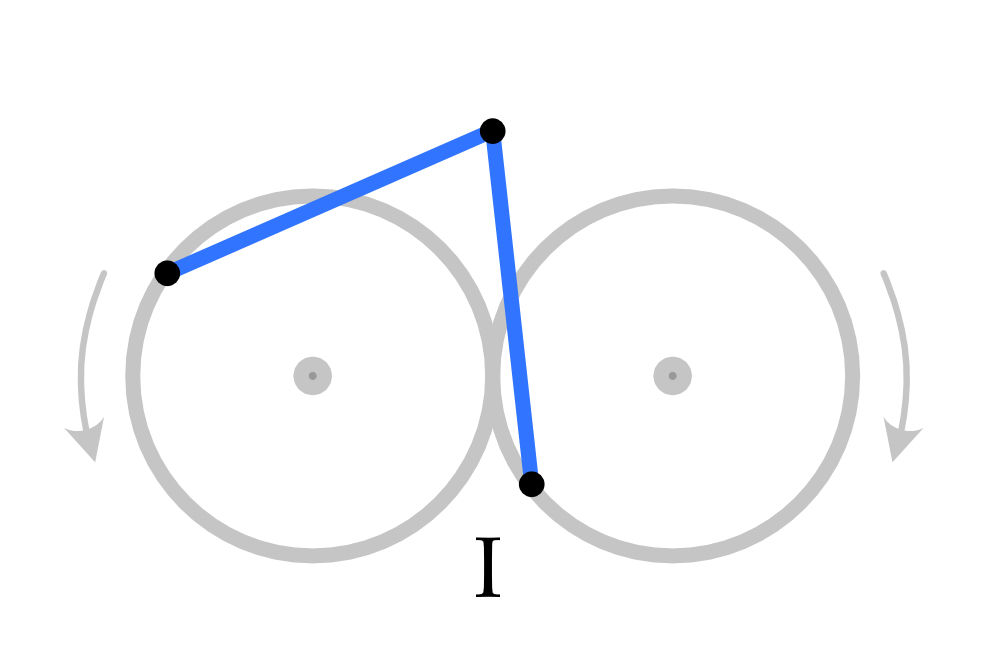
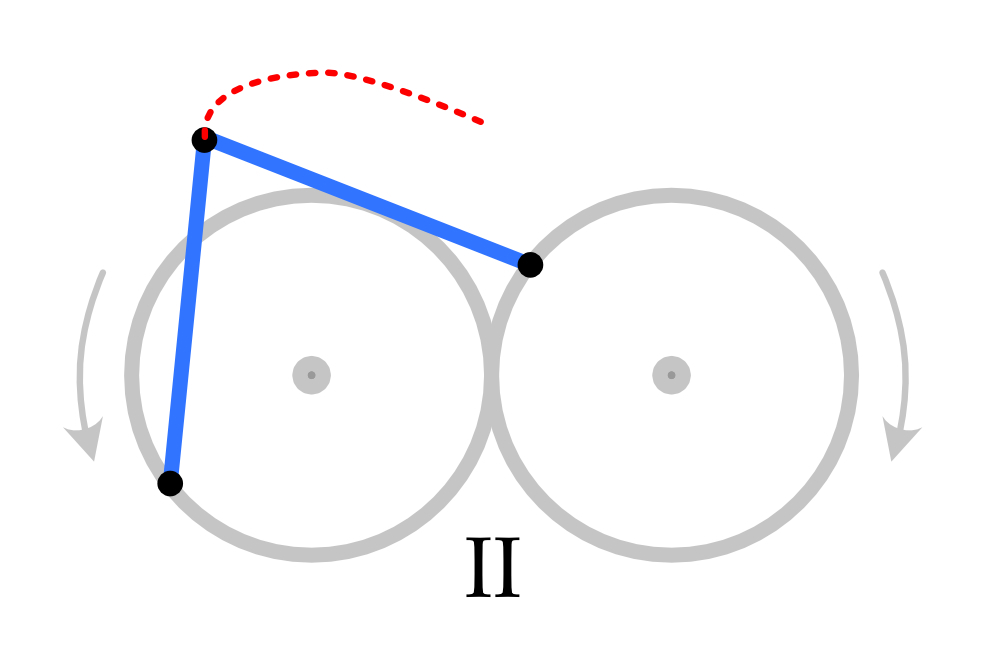
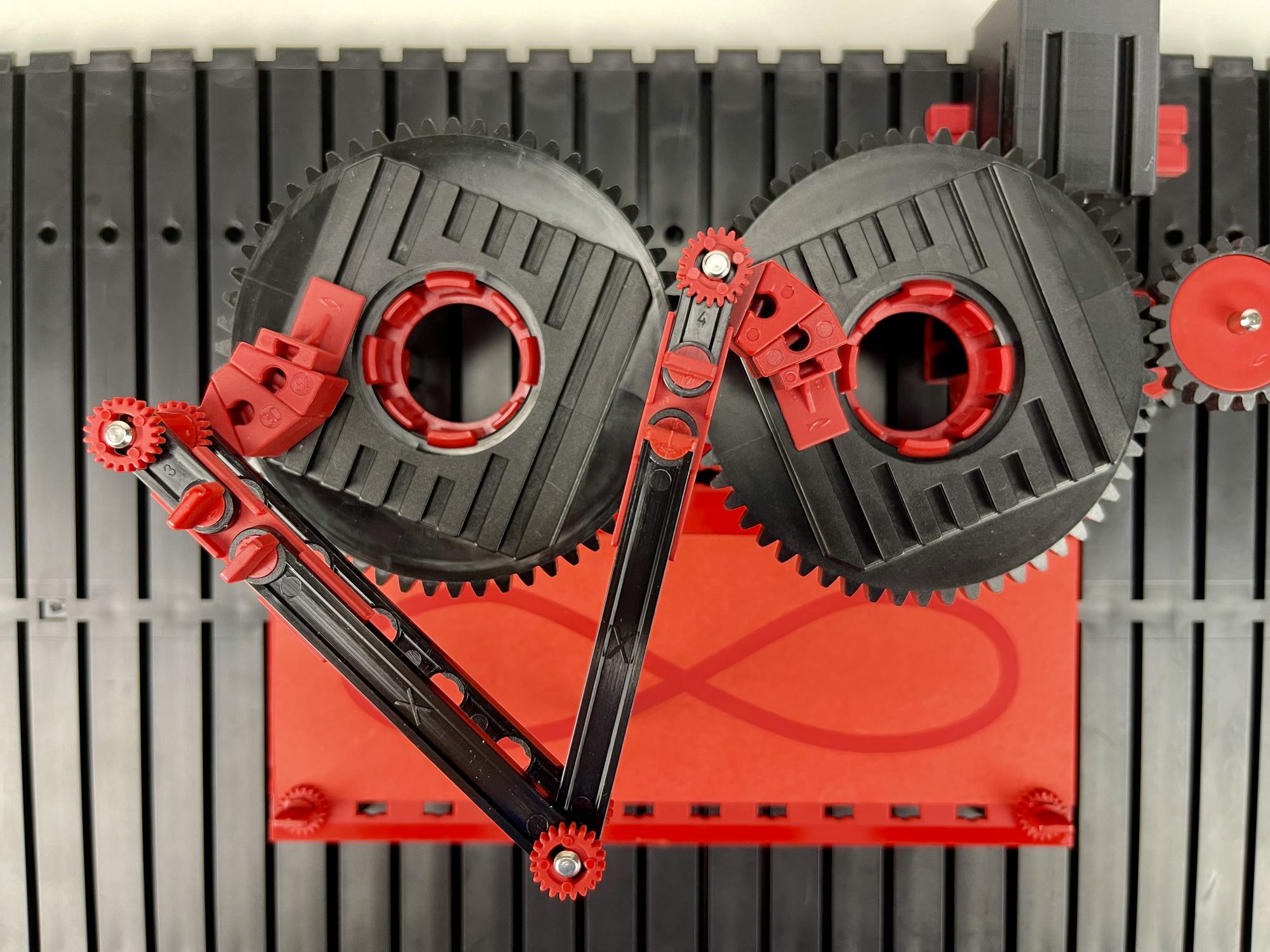
De basis van dit mechaniek wordt gevormd door twee in een draaipunt verbonden drijfstangen op de rand van twee onderling gesynchroniseerde wielen. De wielen hebben een tegengestelde draairichting en zijn een kwartslag (90 graden) met elkaar uit fase. In de figuur zijn enkele stadia van een gehele omwenteling van deze aandrijfwielen getekend. Het draaipunt van de drijfstangen doorloopt hierbij een hippopede-curve. Deze is het grootst door de draaipunten zo veel mogelijk op de buitenranden van fischertechnik draaikransen (31390 / 31391) te leggen.
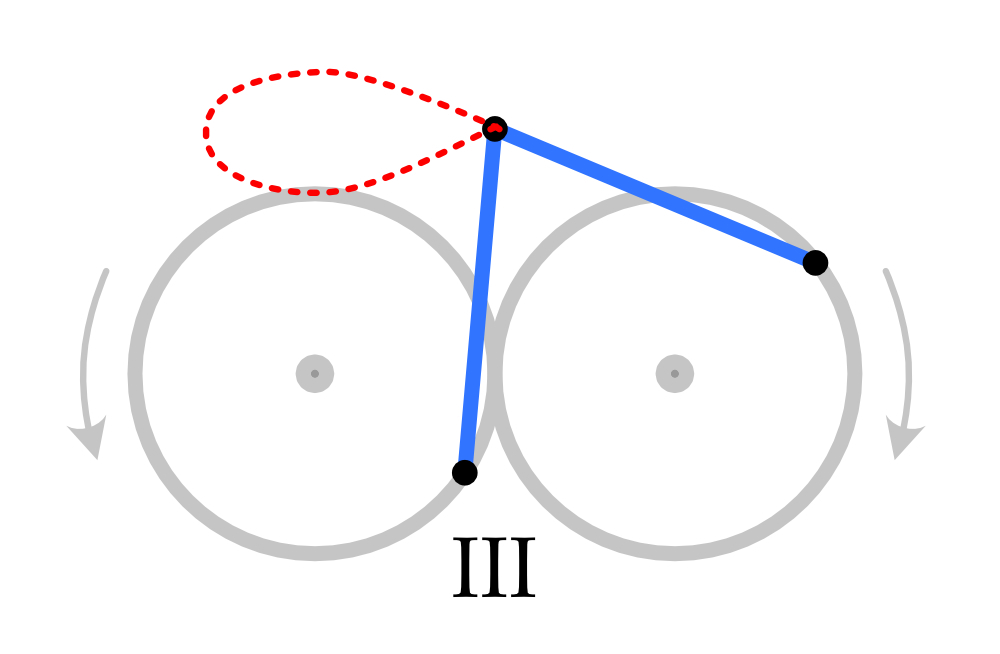
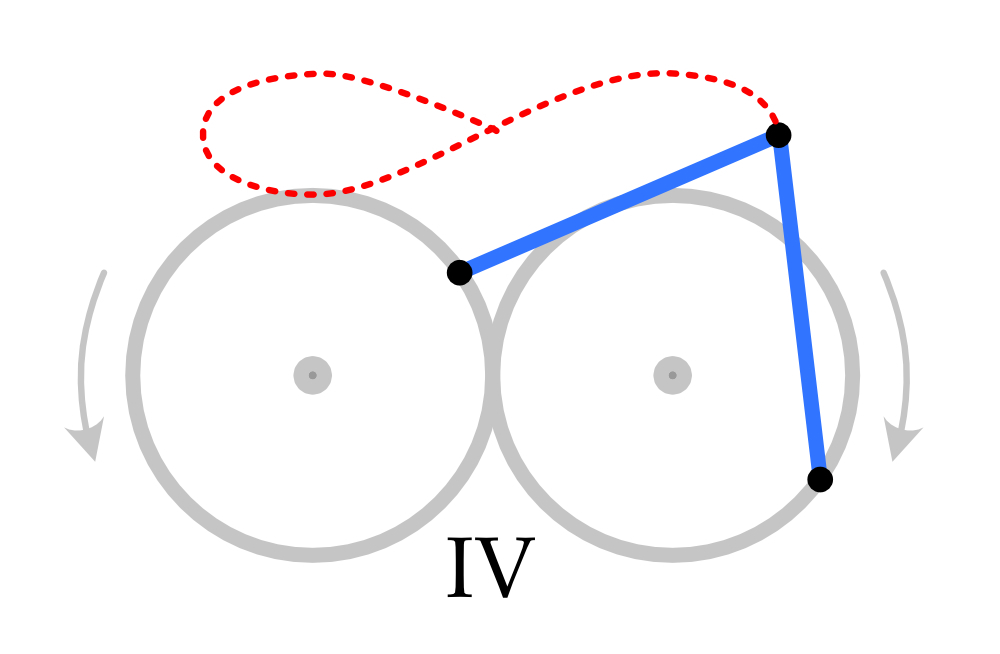
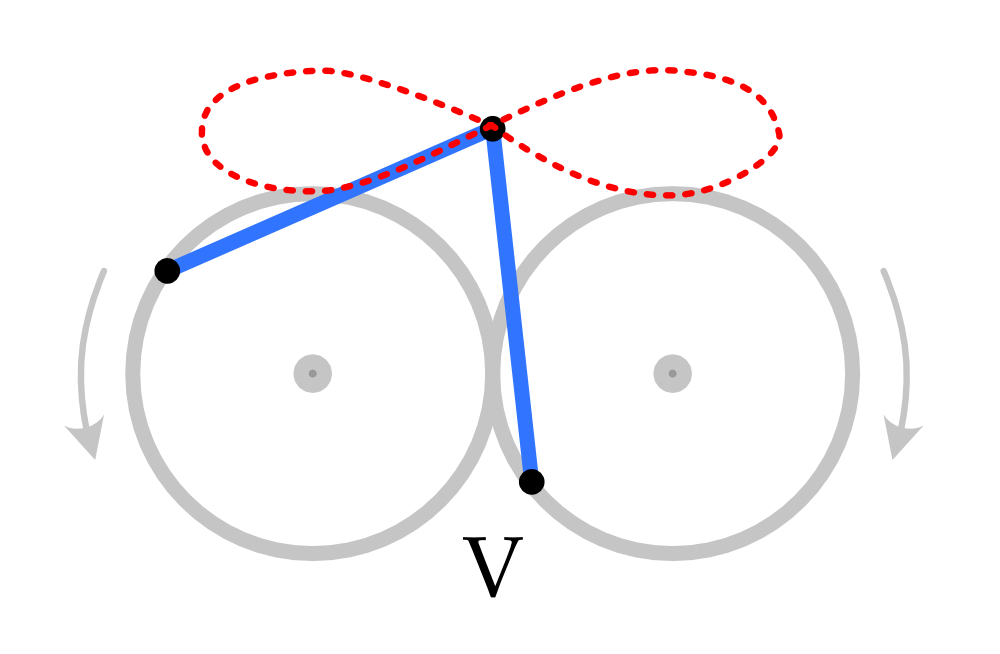
Het is op deze manier dus in elk geval mogelijk om met een oud Amerikaans patent een lemniscaat-vorm te laten beschrijven. Het pad van deze beweging is hierbij echter nog niet lángs de curve gericht. Als basis voor een model waarbij een gemonteerd element (bijvoorbeeld een fischertechnik poppetje) langs het pad moet bewegen, lijkt deze oplossing daarom nog niet optimaal.
Omdat het gewenste pad zichzelf kruist, lijkt een constructie met een vast gemonteerd element in het kruispunt van de curve een mechanisch vraagstuk op te leveren. Een mogelijk alternatief is natuurlijk het element helemaal niet te monteren maar alleen maar de gewenste beweging mee te geven. Het moet bijvoorbeeld mogelijk zijn een wagentje of kogel in een bewegende baan rond te laten rollen. Dit opent bovendien de mogelijkheid, indien nodig voor de voortbeweging, het bewegende element op het kruispunt ‘over te geven’ en het kruisende knooppunt op deze wijze mechanisch compleet te vermijden. Voor het construeren van een dergelijk bewegend parcours lijken de flexibele fischertechnik kogelbanen meer mogelijkheden te bieden dan de gekromde statica-bochtstukken met vaste radius.

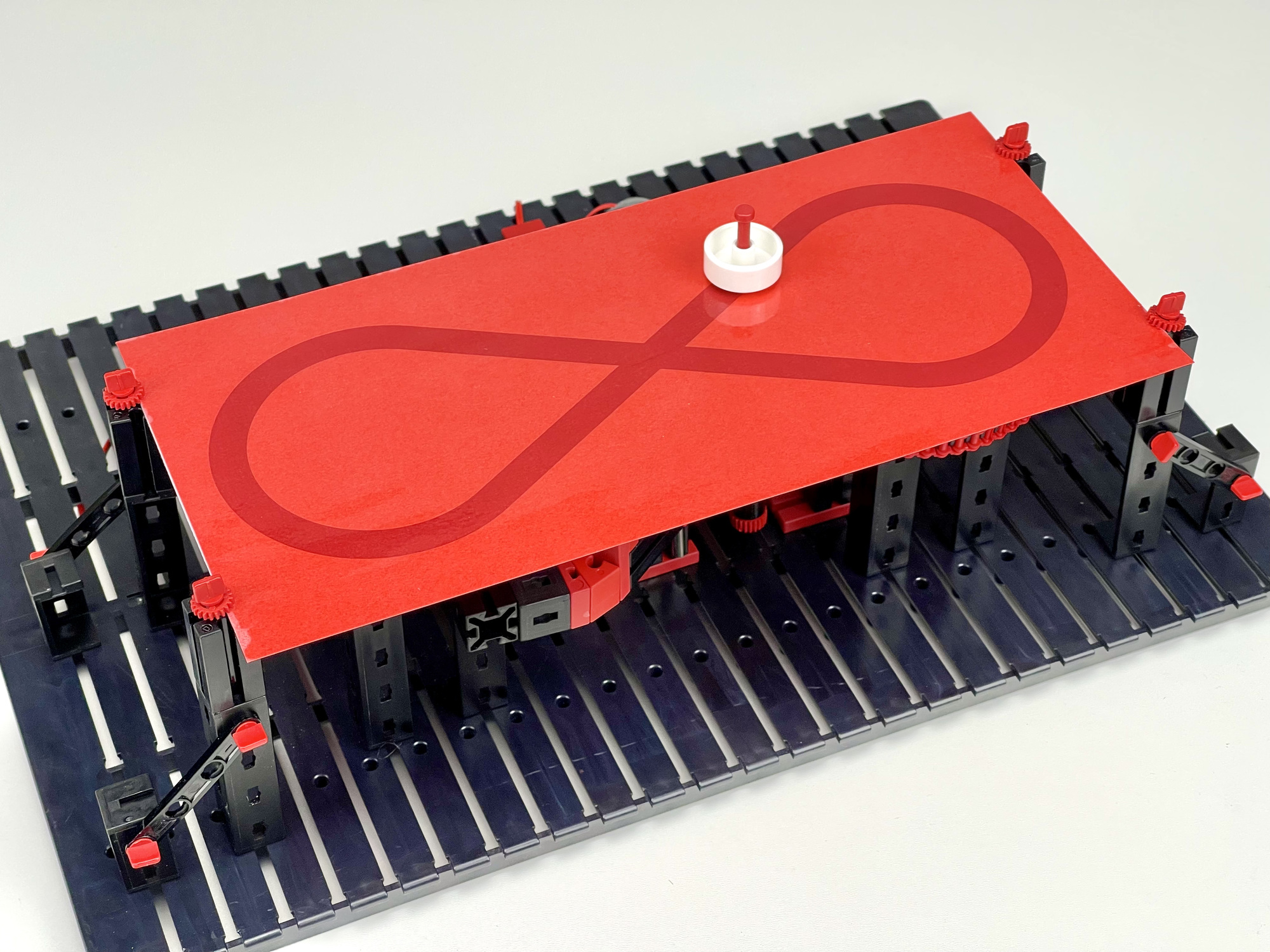
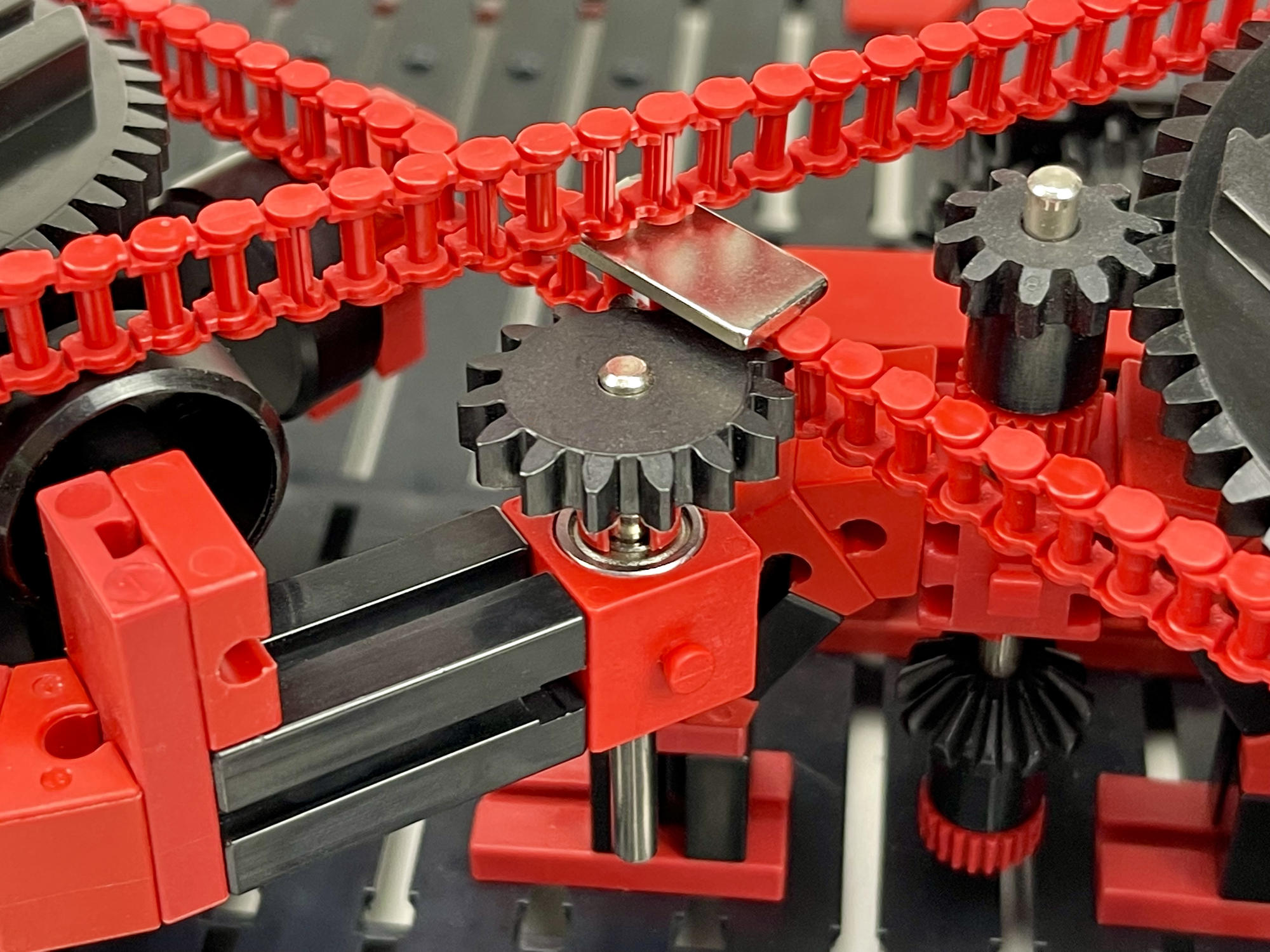
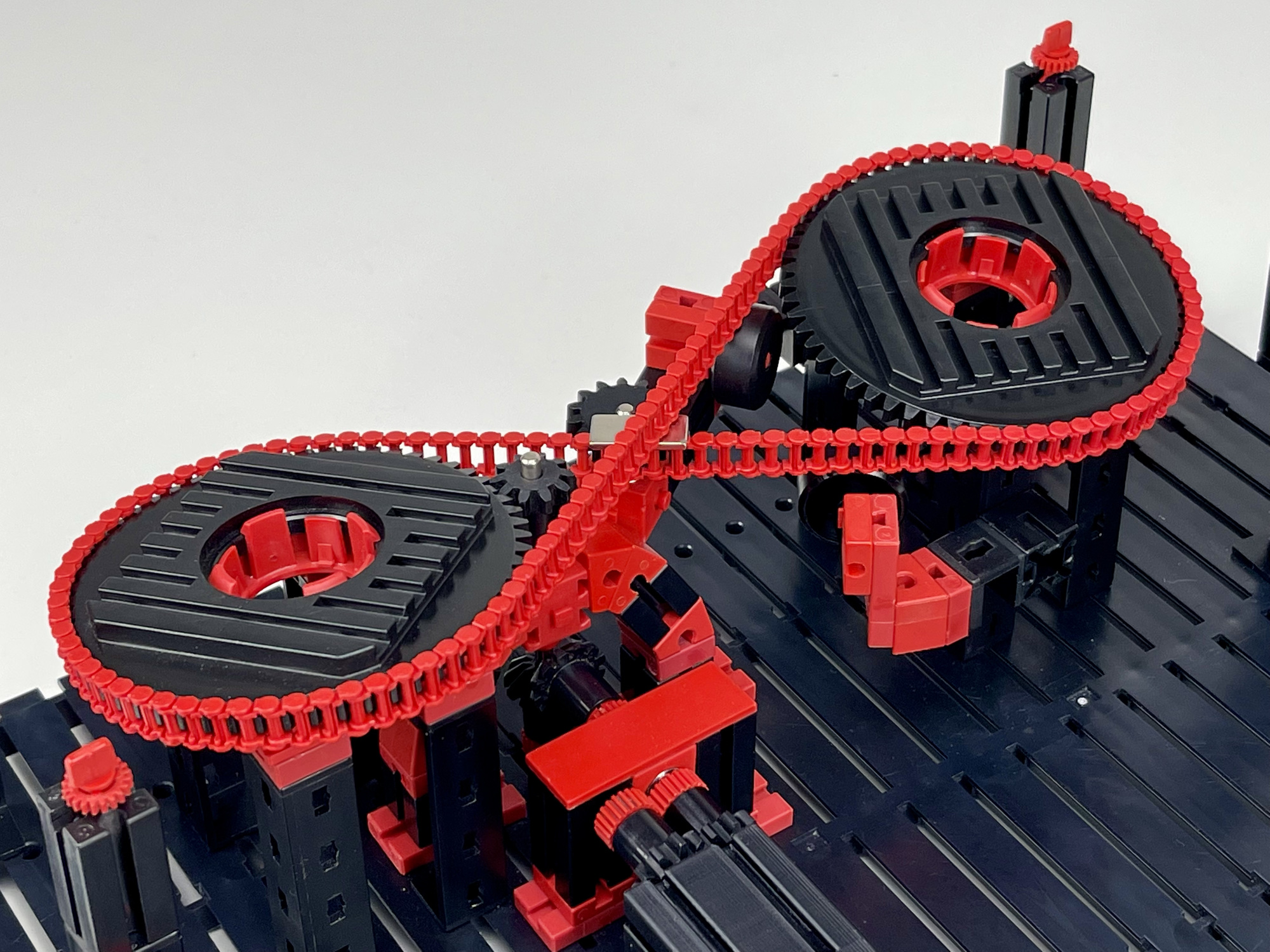
Voordat ik me aan een of ander mechanisch ‘overgifte’-systeem van het rondgaande element in het middelpunt waagde, probeerde ik eerst de hippopede van Booth (rode curve in de grafiek hierboven) te benaderen met een kettingmechaniek. Hierbij beschrijft een magneetje op een ketting de achtvorm. Het kritieke punt bij deze oplossing blijft het kruispunt van de figuur, en in dit geval dus de kettingen. Om het platte magneetje te laten passeren, moesten hiervoor zelfs nog enkele geleidingsrollen worden geplaatst.
Door de draaiassen van de twee tandkransen ten opzichte van elkaar 15 graden te draaien, kon de ketting worden omgelegd. Een neodymium magneet, die op de zijkant van één kettingschakel is gelijmd, kan het andere magneetje in het voetstuk in een bijna perfecte lemniscaatbeweging op de plexiglasplaat rond laten gaan.
Bij de voorgaande modellen wordt een een vrij nauwkeurige hippopede van Booth beschreven met gelijke factoren a en b in de voornoemde formule (rode curve). En in het tweede model wordt de beweging door de wrijving ook al vrij aardig langs de curve gericht. Een nauwkeurigere baanbeschrijving zou met een tweede magneet op de ketting kunnen worden afgedwongen, maar zelfs dan blijft het gewicht van het rond gestuurde element erg beperkt door het gebruik van permanente magneten. Zelfs de krachtige neodymium magneten overspannen de maximale afstand in het kruispunt van de kettingen met moeite.
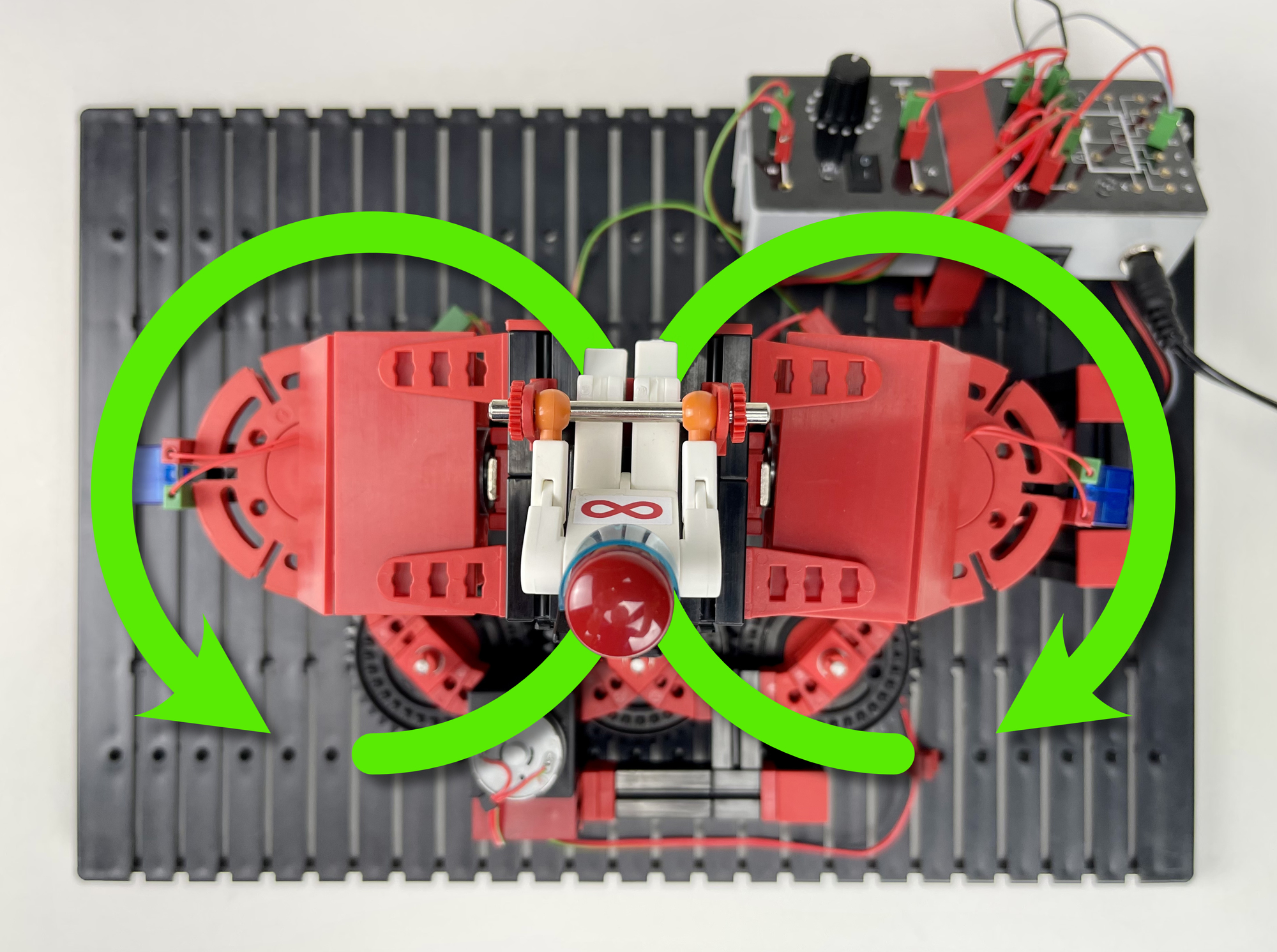
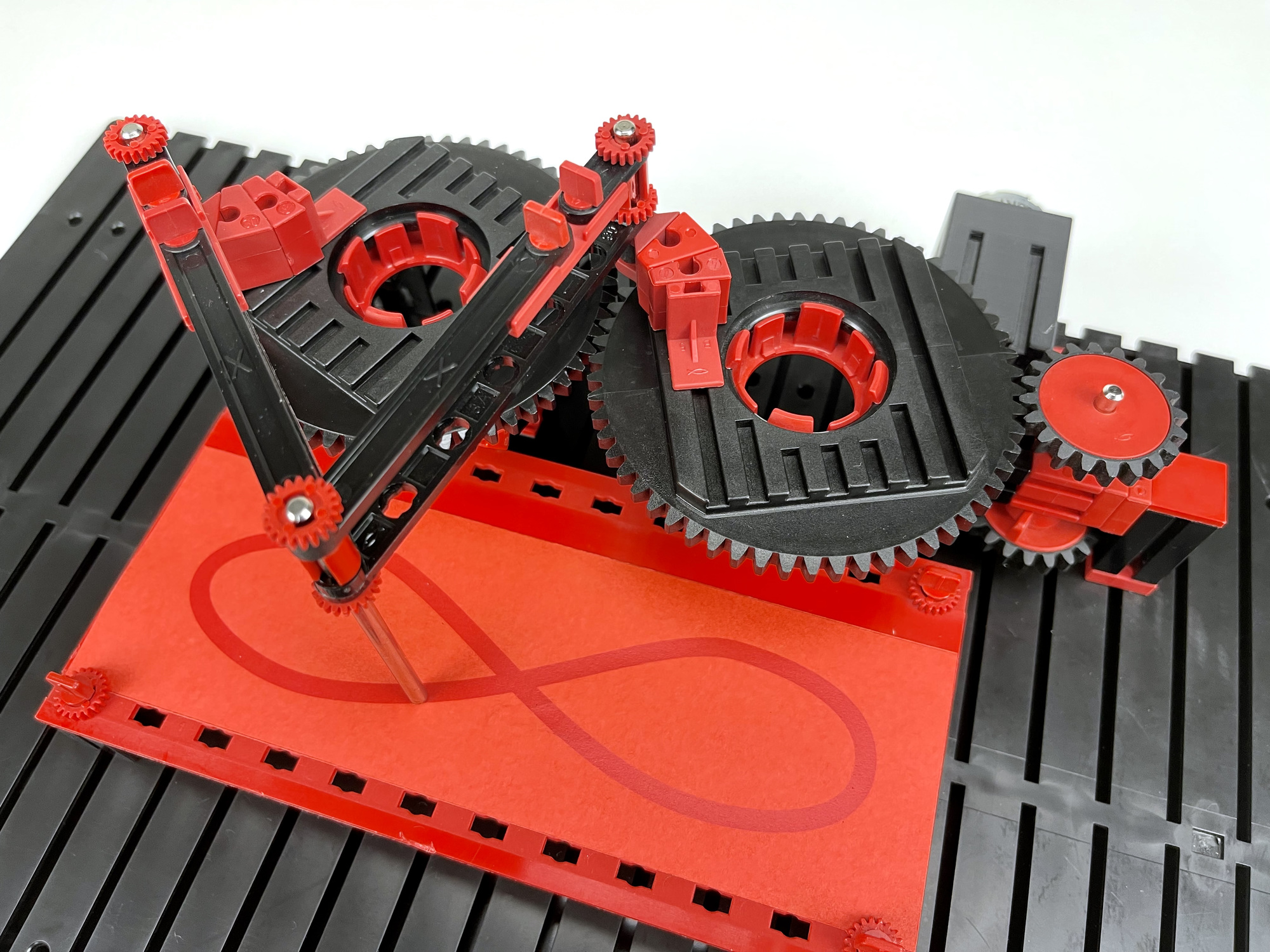
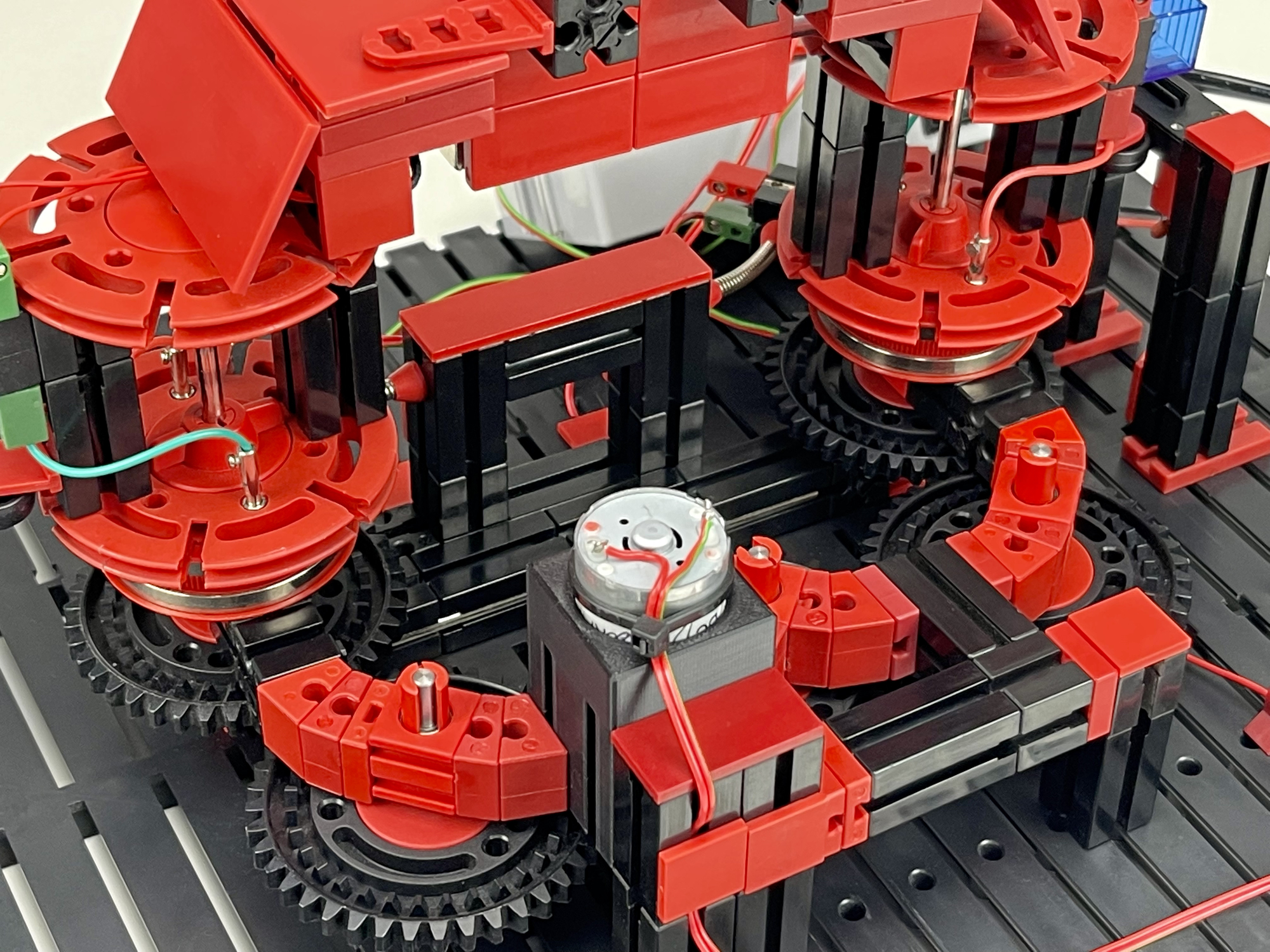
Daarom zocht ik het vervolgens in een constructie met twee, tegen elkaar in draaiende, wielen die het bewegende element in het middelpunt telkens van elkaar overnamen. Op die manier benaderde ik meer de groen getekende hippopede van Booth waarin de factoren a en b omgekeerd evenredig zijn.
Na wat puzzelen met een mechanische oplossing (die er vast moet zijn) keerde ik hiervoor terug naar het principe van magnetisme. Alleen in dit geval, en ook omdat de werking daarvan stuurbaar moet zijn, met electromagneten. Hiervoor kan de fischertechnik magneet 142504, of een Chinese equivalent als de ‘ZYE1-P20/15’ worden gebruikt.
Dit leidde tot de volgende constructie waarmee Lorentz Lemniscaat tot in het oneindige zijn rondjes kan draaien. Stuntman Lorentz, wiens naam in dit kader natuurlijk een knipoog is naar de kracht waarop hij zo vertrouwt, hangt hierbij telkens aan één van de electromagneten van de transportwielen. In het middelpunt teruggekeerd, wordt hij automatisch door het andere wiel overgenomen. Een pulsschakelaar op een flipflop zorgt voor de omschakeling. Omdat er in het begin nogal wat geëxperimenteerd moest worden met de draaisnelheid en positie van de puls-schakelaar voor de flipflop, werd Lorentz’s vraag om een valhelm al vroeg in het proces ingewilligd. En ik verzeker u dat er geen fischertechnik mannetjes gewond raakten bij de totstandkoming van dit model. 😆

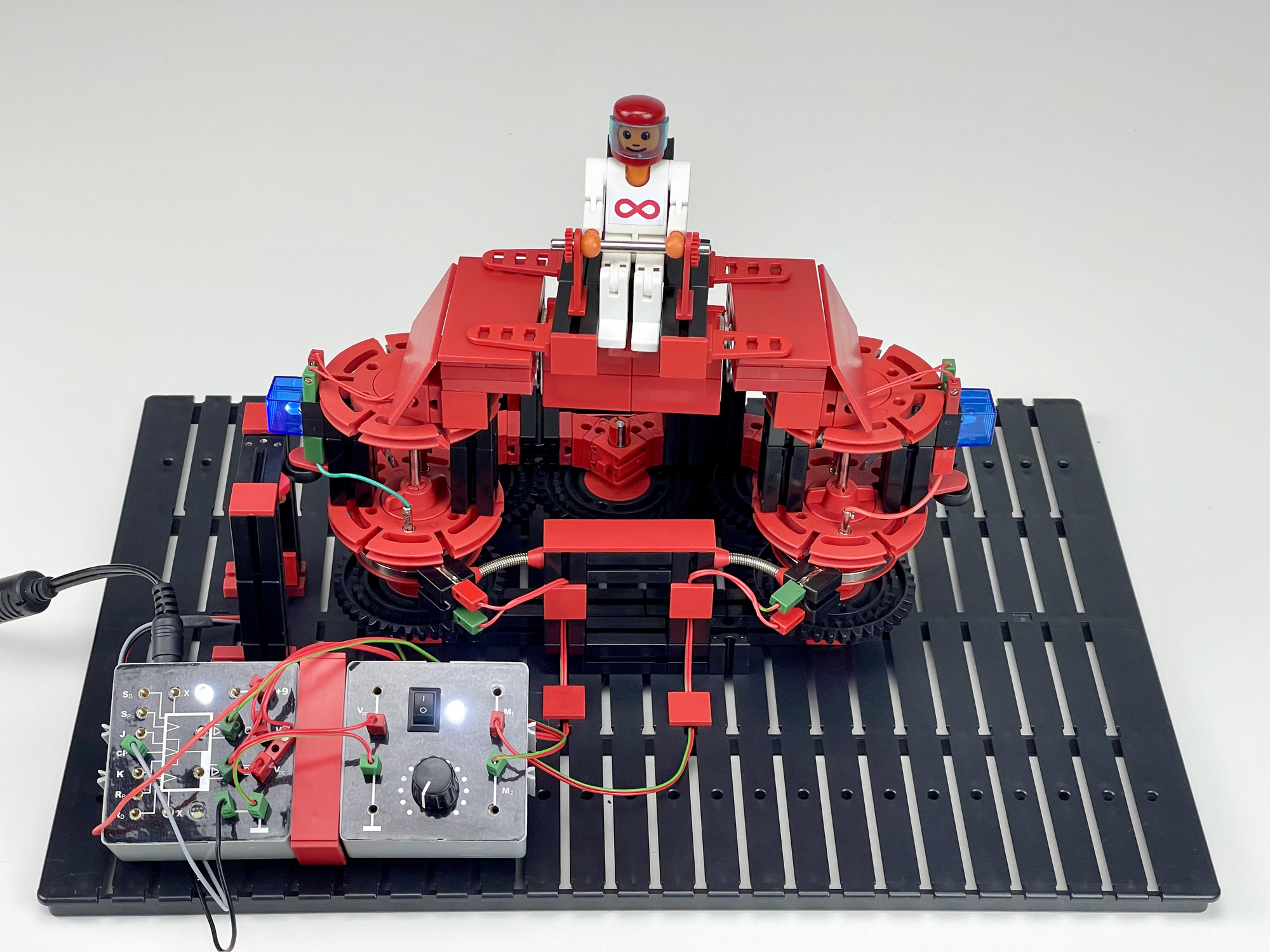



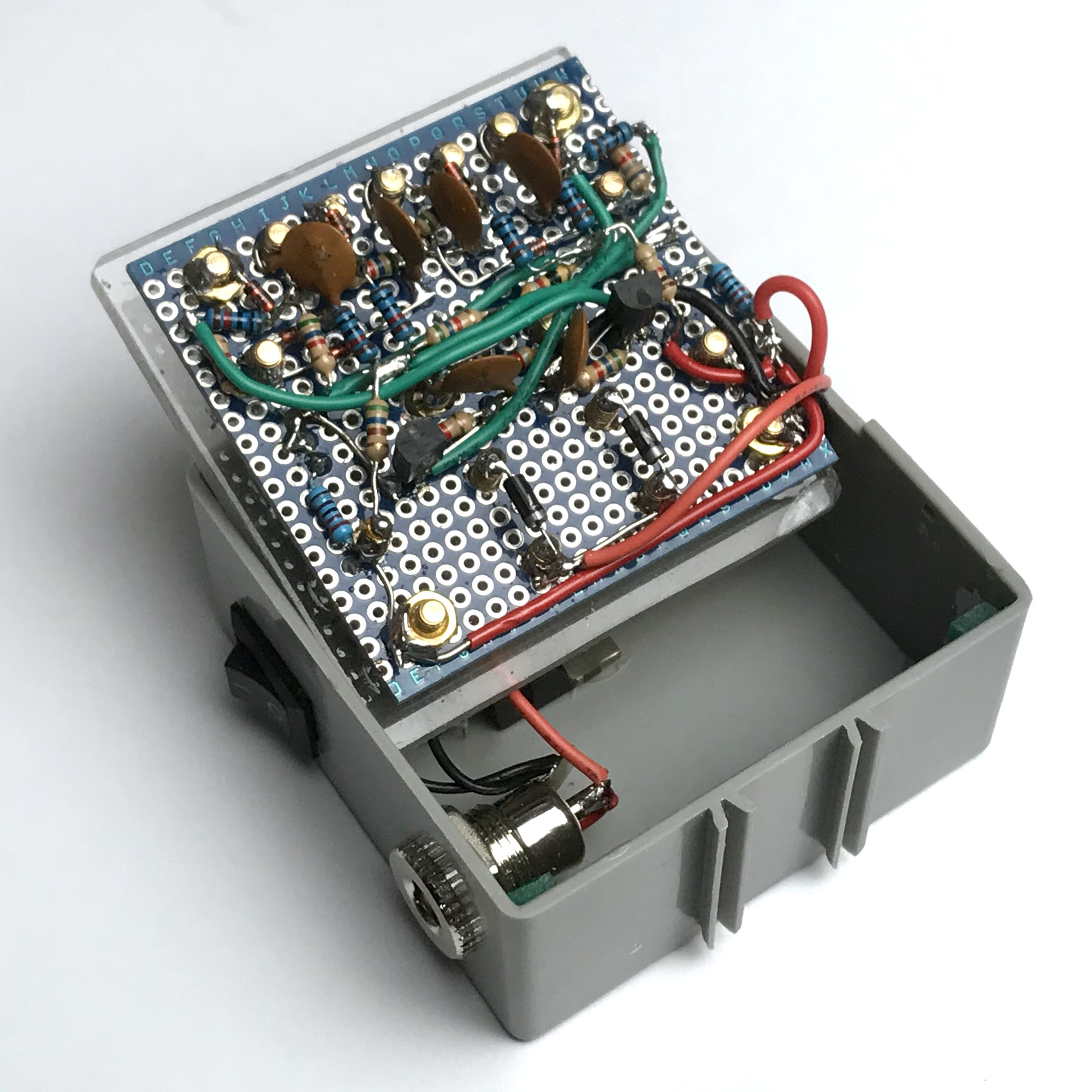
Deze methode vereiste een flipflop waarvan beide uitgangen direct in staat waren afwisselend een electromagneet aan te sturen. Voor de gelegenheid bouwde ik hiervoor een flipflop die ik voorzag van driver-uitgangen met elk een IRF520 Power MOSFET zodat geen aanvullende relais (met de nodige slijtage, geluid en vertraging) nodig waren. Om gemakkelijker te kunnen experimenten met het toerental bouwde ik tevens een motorsturing voor de gebruikte JGA25-370 400rpm 12 volt motor. Een eenvoudig schema met PWM-aansturing was hiervoor voldoende. Beide modules werden ondergebracht in grijze fischertechnik cassettes (35359) en gevoed vanuit een 12 volt netadaptor. De frontplaatjes werden op normaal papier op een laserprinter afgedrukt en daarna gelamineerd en uitgesneden.


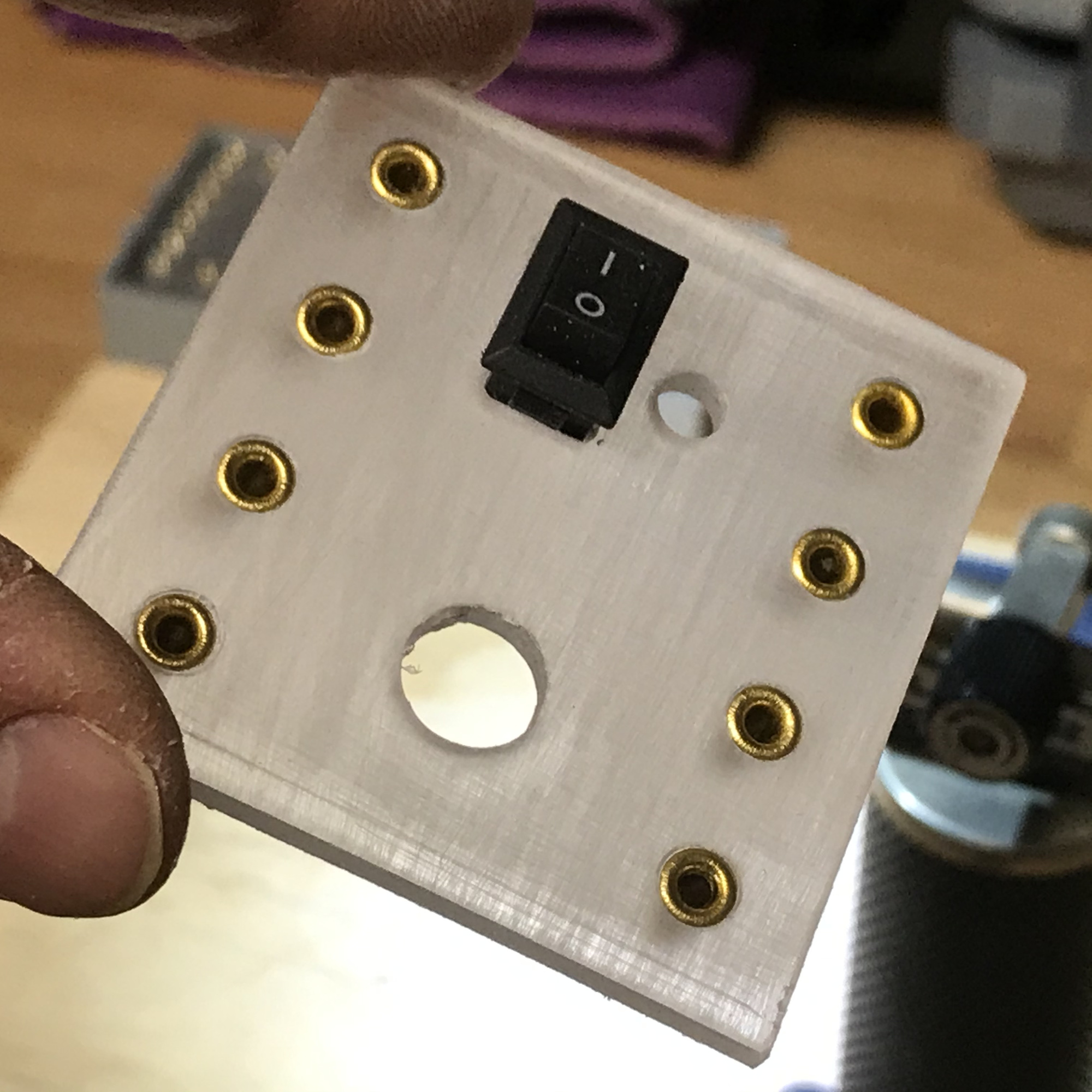
Omdat ik de bevestiging (en de krachten van de stekkers) van de stekker-aansluitingen liefst direct aan het deksel had, was dit geknutsel tegelijk een onderzoek naar alternatieven voor de bekende ‘bundhülsen’ die normaliter op de printplaat zelf worden gesoldeerd. Naast koperen M3-afstandsbussen (zoek online op ‘Hex Nut Spacing Screw Brass’) blijken holnieten (zoek online op ‘Copper Hollow Tubular Rivets 3mm’) hiervoor ook zeer goed te voldoen. De laatste laten zich na verwarming gemakkelijk in een iets te klein geboord gat in het plexiglas front, of PLA-plastic van een 3D-geprinte deksel, duwen. Na afkoeling zitten de buisjes stevig verankerd. Eventueel kunnen de buisjes nog even met een 2,5 mm boortje aan de frontzijde worden nageboord voor een perfecte pasvorm voor de fischertechnik stekkers.
Misschien inspireert mijn geknutsel anderen om verder te experimenteren en bewegingsbanen te construeren die de mathematische lemniscaat nog dichter te benaderen. Zoals als bij het in het filmpje getoonde speelgoedje waarin een kogel wordt rondgestuurd? Of misschien is het bij de eerste oplossing met een aanvullende stangenconstructie mogelijk de richting van het element over het pad mee te sturen met de curve?
Of misschien toch een compleet mechanische constructie maken? Dat moet volgens dit filmpje, én dit filmpje, toch mogelijk zijn? Kortom, er kan nog genoeg uitgeknobbeld en geknutseld worden. Maar ook als u slechts volgende keer als u deze wonderlijke vorm ziet even glimlacht, heeft Lorentz Lemnicaat zijn doel al bereikt. De lemniscaat-vorm zal mensen vast nog verwonderen tot in het ∞...
Dit artikel over eindeloze lemniscaat is ook (in de Duitse taal) gepubliceerd in nummer 2 van 2021 van de ft:pedia; een zeer interessant online magazine over techniek in combinatie met het constructiemateriaal fischertechnik.