
I decided to build a second module using the L298N. This popular H-bridge chip has been widely used for years for all kinds of applications and lacks the previously described 'brake' logic of the DRV8833 and TB6612. Therefore, if IN1 and IN2 are both HIGH, the corresponding outputs OUT1 and OUT2 are also simply HIGH. This is usually called a slow brake. The motor also stops fairly quickly in this case, but not as abruptly as when the motor winding is shorted, as is possible with the DRV8833. One advantage, however, is that this behavior allows the four outputs of the L298N chip to each be used as independent driver outputs if desired. So not only as two complete H-Bridges for controlling two motors, but also as a combination of one H-Bridge and two independently used driver outputs, or, if desired, even as four independent outputs.

Thereby, the L298N has the advantage that the maximum offered motor voltage may be a lot higher (up to 48 volts!) so that the current and heat generation when using a heavier motor can remain lower. Nevertheless, a much larger heat sink can be mounted on the L298N. All in all, in this way a somewhat more industrial solution can be obtained which will not have the slightest difficulty with the well-known fischertechnik motors, but which also allows the use of industrial 24 volt motors.
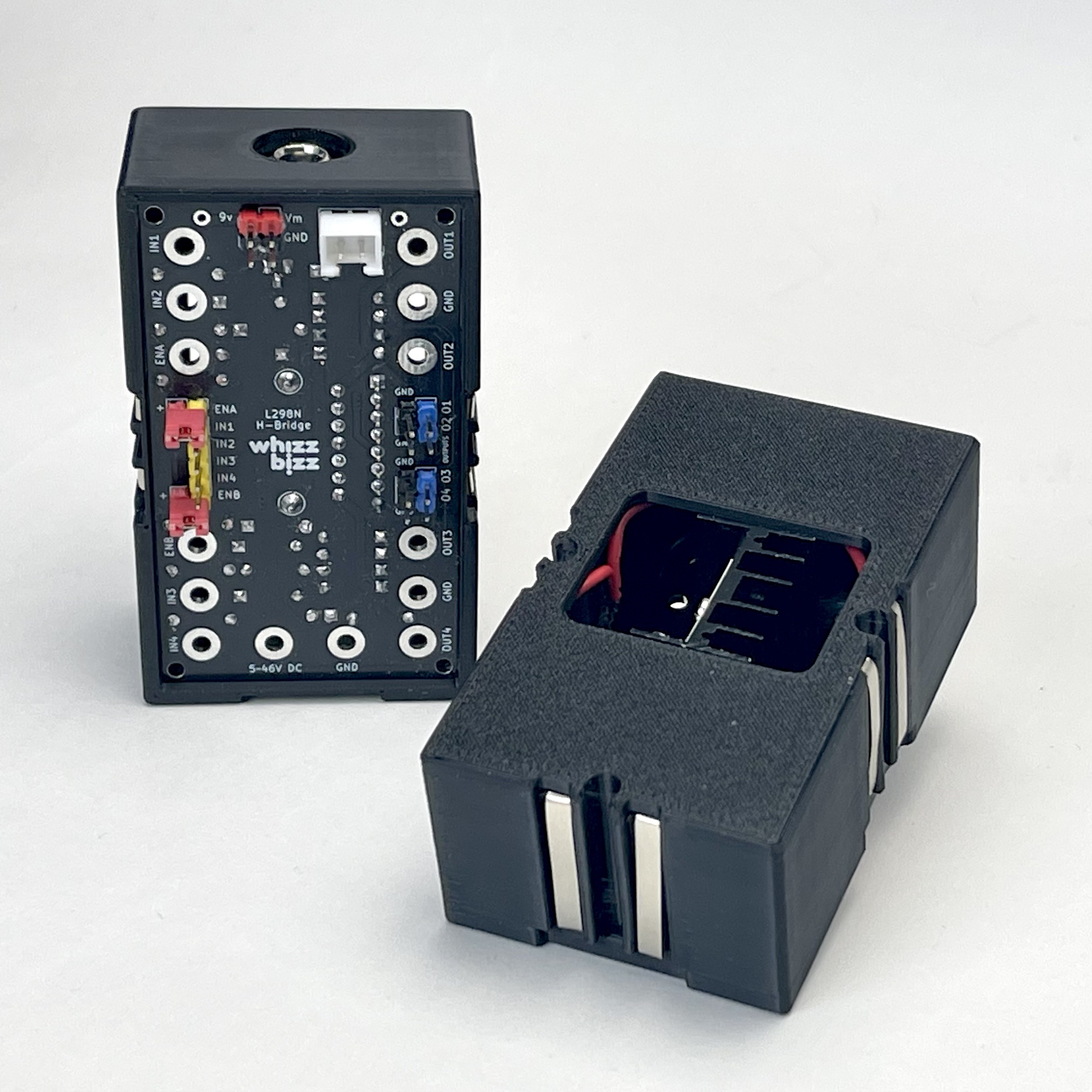
I decided to change the practical construction for this second module. As a result, this module looks different from the previous ones. The closed front plate with inscriptions and soldered plug sockets was dropped. To facilitate the use of the fischertechnik plugs, I chose 2.5 mm holes and duplicated all inputs and outputs with Dupont pin-headers. The two “enable” inputs can thus be pulled simply by placing a sweater HIGH if a separate control signal for turning the motors on and off is not needed.
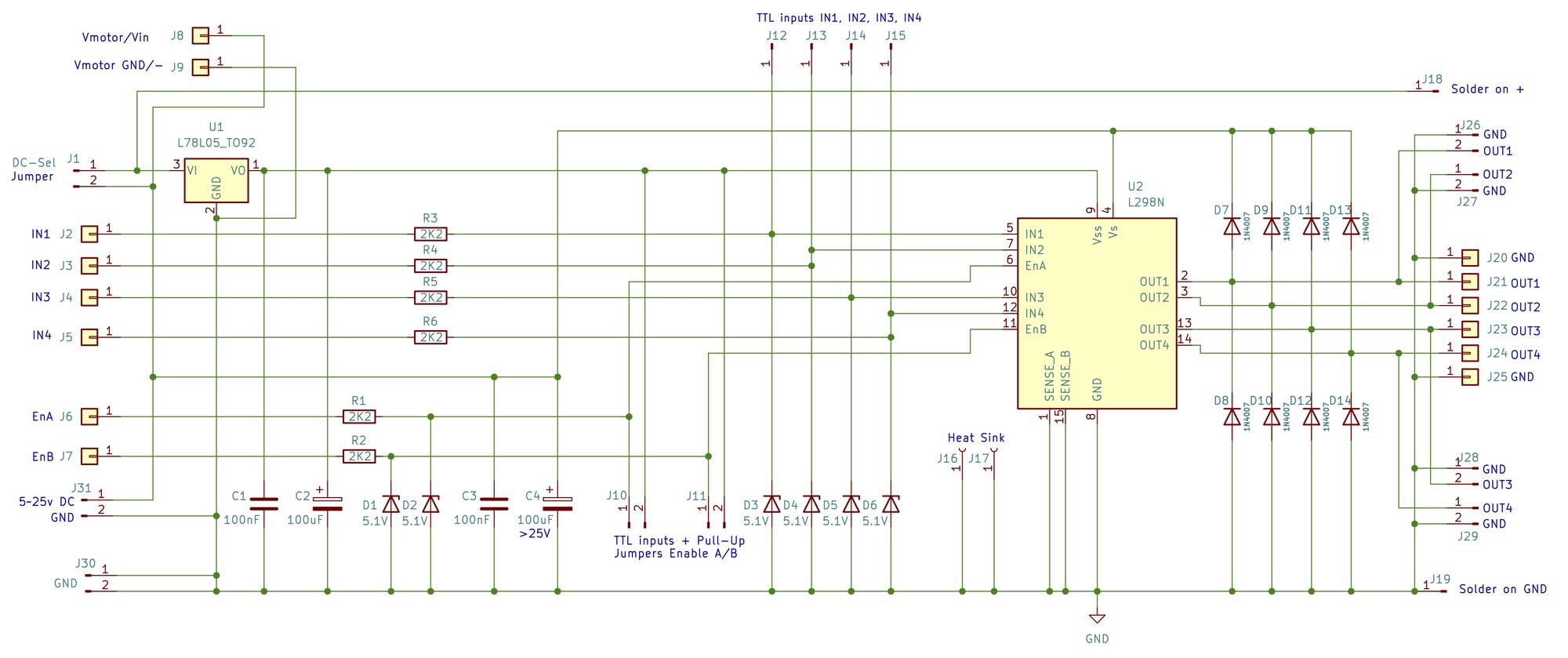
I also added a JST connector and separate connections for the motor voltage. At the top of the housing came a DC connector for an external DC adaptor so that the motor voltage can easily be sourced externally if desired. As long as no external motor voltage is required, a sweater allows the motor voltage of the outputs to also be sourced directly from the normal 'Silberling' power supply from the metal strips on the side of the module. This sweater should be removed if an external motor voltage is provided. For the 5-volt supply voltage of the chip itself, a small voltage regulator is included on the PCB. However, this limits the optionally offered external supply voltage input voltage to a maximum of 35 volts. For the 24 volt motors mentioned above, this is obviously more than sufficient. The circuit diagram is outlined below.
Despite these major visual differences, the module is still 100% compatible with the various (TXT) controller variants and traditional fischertechnik electronics modules. With a single module it is thus possible to replace multiple fischertechnik relay modules.
In old documentation I found a good model to test the H-Bridge module in practice. Click through here to a practical application....